மூடப்பட்ட தானியங்கி கட்டுப்பாட்டு அமைப்புகள்
 மூடிய தானியங்கி கட்டுப்பாட்டு அமைப்புகள் (ACS) திறந்த சுற்றுகளிலிருந்து பயன்படுத்தப்படும் உபகரணங்களில் மற்றும் ஆட்டோமேஷனின் முழுமையில் வேறுபடுகின்றன. ACS திறந்த நிலையில், முக்கிய அலகு (கட்டுப்பாட்டு உபகரணங்கள் உட்பட) மின் நிறுவலின் உண்மையான இயக்க முறைமை (ஓட்டுநர் மோட்டார், இயங்கும் இயந்திரம்) பற்றிய தகவலைப் பெறவில்லை.
மூடிய தானியங்கி கட்டுப்பாட்டு அமைப்புகள் (ACS) திறந்த சுற்றுகளிலிருந்து பயன்படுத்தப்படும் உபகரணங்களில் மற்றும் ஆட்டோமேஷனின் முழுமையில் வேறுபடுகின்றன. ACS திறந்த நிலையில், முக்கிய அலகு (கட்டுப்பாட்டு உபகரணங்கள் உட்பட) மின் நிறுவலின் உண்மையான இயக்க முறைமை (ஓட்டுநர் மோட்டார், இயங்கும் இயந்திரம்) பற்றிய தகவலைப் பெறவில்லை.
ஒரு மூடிய ASUB இல், கட்டுப்பாட்டு கூறுகளுக்கு தகவல் அனுப்பப்படுகிறது, இது பொருத்தமான கட்டளை சமிக்ஞைகளை சமர்ப்பிப்பதோடு சேர்ந்துள்ளது. அத்தகைய தகவலை அனுப்பும் சுற்று கட்டுப்பாட்டு வளையத்தை மூடுகிறது, மூடிய ACS அல்லது பின்னூட்ட ACS ஐ உருவாக்குகிறது.
மூடிய மற்றும் திறந்த ACS க்கு இடையிலான வேறுபாட்டை, ஜெனரேட்டர்-மோட்டார் (G-D) அமைப்பில் மின்சார மோட்டாரின் வேகத்தைக் கட்டுப்படுத்தும் உதாரணத்துடன் விளக்கலாம். ACS திறந்தவுடன் (படம் 1, a), மின்சார மோட்டரின் செட் வேகம் பொட்டென்டோமீட்டர் P மூலம் கைமுறையாக அமைக்கப்படுகிறது. வேக சரிசெய்தல் ஒரு டேகோமீட்டரால் பார்வைக்கு மேற்கொள்ளப்படுகிறது, இது TG டேகோஜெனரேட்டரால் இயக்கப்படுகிறது. செட்பாயிண்டிலிருந்து எந்த வேக விலகலும் பொட்டென்டோமீட்டர் ஸ்லைடரில் செயல்படுவதன் மூலம் ஆபரேட்டரால் அகற்றப்படும்.
மூடிய ACS இல் (படம்.1, ஆ) டிஜி டகோஜெனரேட்டரின் ஆர்மேச்சர் OVG ஜெனரேட்டரின் தூண்டுதல் சுற்றுகளில் சேர்க்கப்பட்டுள்ளது, இது ஒரு மூடிய அல்லது பின்னூட்ட அமைப்பை உருவாக்குகிறது (இந்த விஷயத்தில் வேகமான பின்னூட்டத்துடன்).
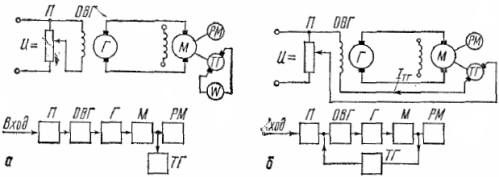
அரிசி. 1. G-M அமைப்பில் மின்சார மோட்டார் கட்டுப்பாட்டு சுற்று: a — திறந்த ACS, b — மூடிய ACS
பொட்டென்டோமீட்டரின் (Azn) மின்னோட்டத்திற்கு இயக்கப்பட்ட ஒரு மூடிய சுற்றுவட்டத்தில் டகோஜெனரேட்டரால் (Aztg) உருவாக்கப்படும் மின்னோட்டம் இந்த மின்னோட்டங்களின் வடிவியல் வேறுபாட்டிற்கு சமமான மின்னோட்டத்தில் செயல்படுகிறது. பொட்டென்டோமீட்டரின் ஸ்லைடரைப் பயன்படுத்தி, ஆபரேட்டர் OVG இன் தூண்டுதல் சுருளில் விளைந்த மின்னோட்டத்தின் மதிப்பை அமைக்கிறது, இதில் மின்சார மோட்டரின் தொடர்புடைய வேகம் வழங்கப்படுகிறது. இங்குதான் ஆபரேட்டரின் பங்கு முடிவடைகிறது. எதிர்காலத்தில், கணினி தானாகவே ஒரு குறிப்பிட்ட துல்லியத்துடன் மின்சார இயக்ககத்தின் செயல்பாட்டின் செட் பயன்முறையை பராமரிக்கிறது.
சுமை ஸ்பைக்கின் விளைவாக, குறிப்பிட்ட வேகத்துடன் ஒப்பிடும்போது மின்சார மோட்டாரின் வேகம் குறைந்துவிட்டது என்று வைத்துக்கொள்வோம். வேகத்தைக் குறைப்பது டகோஜெனரேட்டரின் வேகம் மற்றும் அதன் முனையங்களில் மின்னழுத்தத்தில் தொடர்புடைய குறைப்புடன் சேர்ந்துள்ளது. இதையொட்டி, பின்னூட்ட சுற்றுகளில் தற்போதைய Aztg குறைவதற்கு வழிவகுக்கும், மற்றும் பொட்டென்டோமீட்டரின் ஸ்லைடரின் ஒரு குறிப்பிட்ட நிலையில் - ஜெனரேட்டரின் தூண்டுதல் முறுக்கு விளைவாக ஏற்படும் மின்னோட்டத்தின் அதிகரிப்பு. ஜெனரேட்டர் மின்னழுத்தம் மற்றும் மோட்டார் வேகம் அதற்கேற்ப அதிகரிக்கும்.
பின்னூட்ட சுழற்சியில் மின்னோட்டம் செட் மதிப்பை அடையும் வரை மற்றும் மோட்டார் வேகம் செட் மதிப்பை அடையும் வரை வேகம் மற்றும் மின்னழுத்தத்தை அதிகரிக்கும் செயல்முறை தொடரும்.
தானியங்கி கட்டுப்பாட்டு அமைப்புகளின் பகுப்பாய்வில், செயல்பாட்டு விளக்கப்படங்கள்… அத்தியில்.ACS இன் 2 பரிமாற்ற செயல்பாட்டுத் திட்டம், இதில் பின்வரும் கூறுகள் உள்ளன:
1 - செயல்பாட்டு முறையை அமைக்கும் முக்கிய சாதனம், கட்டளை கொடுக்கிறது, துடிப்பு அல்லது சமிக்ஞையைத் தொடங்கவும்,
2 - ஒப்பீட்டு உறுப்பு. இது மாஸ்டரிடமிருந்து X1 சமிக்ஞையை உள்ளடக்கியது, சமிக்ஞை X0, இது கட்டுப்படுத்தப்பட்ட மதிப்பின் வேகம் அல்லது அளவை தீர்மானிக்கிறது. ஒன்பதாவது முக்கிய பின்னூட்ட உறுப்பில் இருந்து வரும் சிக்னலை கணக்கில் எடுத்துக்கொண்டு, உறுப்பு 2 பெறப்பட்ட சிக்னல்களை ஒப்பிட்டு, கூடுதலாக சரிசெய்யப்பட்ட X2 சமிக்ஞையை அனுப்புகிறது,
3 - மாற்றும் உறுப்பு, சிக்னல் ஆப் அதை மற்றொரு வடிவமாக மாற்றுகிறது, மேலும் பரிமாற்றத்திற்கு மிகவும் வசதியானது. எடுத்துக்காட்டாக, சமிக்ஞை X2 ஹைட்ராலிக் (நியூமேடிக், மெக்கானிக்கல்) அழுத்தத்தின் வடிவத்தில் வழங்கப்படுகிறது. உறுப்பு 3 அதை மின்னோட்டமாக மாற்றுகிறது. இந்த வகையான மாற்றத்திற்கு கூடுதல் ஆற்றல் தேவைப்படலாம் என்பதால், உறுப்பு 3 PE ஆற்றல் மூலத்துடன் இணைக்கப்பட்டுள்ளது,
4 — உறுப்பைச் சேர்த்தால், அது இரண்டு சிக்னல்களைப் பெறுகிறது: திருத்தும் உறுப்பு (நினைவக உறுப்பு) இலிருந்து X3 மற்றும் X8 8. இந்த சமிக்ஞைகள் உறுப்பு 4 ஆல் சுருக்கப்பட்டு அடுத்த உறுப்புக்கு அனுப்பப்படுகின்றன,
5 — பெருக்கும் உறுப்பு, உள்ளீட்டு சமிக்ஞை X1 பலவீனமாக இருக்கலாம் மற்றும் அடுத்தடுத்த பரிமாற்றத்திற்கு பெருக்கப்பட வேண்டும். இது PE சக்தி மூலத்துடன் இணைக்கப்பட்ட உறுப்பு 5 மூலம் செய்யப்படுகிறது,
6 - நிர்வாக உறுப்பு, பெறப்பட்ட சமிக்ஞையை இயக்குகிறது (மின்சார மோட்டார், மின்காந்த ரிலே, சர்வோ மோட்டார்),
7 - சரிசெய்யக்கூடிய பொருள் அல்லது வேலை செய்யும் இயந்திரம்.
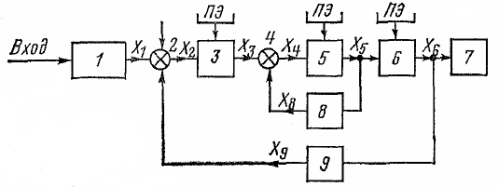
அரிசி. 2. ACS இன் செயல்பாட்டு வரைபடம்
ஒவ்வொரு தன்னியக்க உறுப்பும் ஒரு ஆற்றல் மாற்றி ஆகும், அதன் உள்ளீட்டில் மதிப்பு X' பயன்படுத்தப்படும், மேலும் X மதிப்பு வெளியீட்டிலிருந்து அகற்றப்படும். "ஒரு நிலையான நிலையில் உள்ள ஒவ்வொரு உறுப்புக்கும் ஒரு குறிப்பிட்ட சார்பு X உள்ளது" (X'), இது நிலையான பண்பு என்று அழைக்கப்படுகிறது.
ஒரு மூடிய தானியங்கி கட்டுப்பாட்டு அமைப்பு பின்னூட்டத்தின் முன்னிலையில் வகைப்படுத்தப்படுகிறது; கணினியின் வெளியீட்டை அதன் உள்ளீட்டுடன் இணைக்கும் குறைந்தது ஒரு பின்னூட்ட வளையமாவது உள்ளது. கூடுதலாக, தனிப்பட்ட ஏசிஎஸ் உறுப்புகளின் வெளியீடு மற்றும் உள்ளீட்டை இணைக்கும் உள் பின்னூட்டம் என்று அழைக்கப்படுபவை இருக்கலாம்.
கருத்து கடினமான மற்றும் நெகிழ்வானதாக பிரிக்கப்பட்டுள்ளது. கடினமான கட்டுப்பாடுகள் அமைப்பின் தற்காலிக மற்றும் நிலையான செயல்பாட்டு முறைகளில் இயங்குகின்றன, நெகிழ்வானவை - நிலையற்றவற்றில் மட்டுமே. நேர்மறை மற்றும் எதிர்மறை கருத்துக்களை வேறுபடுத்துங்கள். ஒழுங்குபடுத்தப்பட்ட மதிப்பு அதிகரிக்கும் போது, நேர்மறை இணைப்பு அதை இன்னும் அதிகரிக்கிறது, எதிர்மறையானது, மாறாக, குறைகிறது. பின்னூட்டங்கள் சுழற்சி, வேகம், மின்னழுத்தம், மின்னோட்டம் போன்றவற்றின் கோணத்திற்கு விகிதாசார சமிக்ஞைகளை அனுப்பலாம். மற்றும் அதன்படி கோணம், வேகம், மின்னழுத்தம், தற்போதைய பின்னூட்டங்கள் என்று அழைக்கப்படுகின்றன. மேலும் விவரங்களுக்கு இங்கே பார்க்கவும்: ஆட்டோமேஷன் அமைப்புகளின் கூறுகள்
செயல்பாட்டின் கொள்கையின்படி, ACS ஐ மூன்று குழுக்களாக பிரிக்கலாம்:
-
கட்டுப்படுத்தப்பட்ட மற்றும் அமைக்கப்பட்ட மதிப்புகளுக்கு இடையிலான உறவு உடைக்கப்படாத தொடர்ச்சியான செயல்பாடு,
-
உந்துவிசை நடவடிக்கை, இதில் கட்டுப்படுத்தப்பட்ட மற்றும் செட் மதிப்புகளுக்கு இடையிலான இணைப்பு சீரான இடைவெளியில் நடைபெறுகிறது,
-
ஒரு மதிப்பு ஒரு குறிப்பிட்ட மதிப்பை அடையும் போது மட்டுமே தொடர்பு ஏற்படும் ரிலே செயல்.
கொடுக்கப்பட்ட மதிப்பு காலப்போக்கில் மாறும் சட்டத்தைப் பொறுத்து, ACS ஐ மூன்று குழுக்களாகப் பிரிக்கலாம்:
-
நிலையான அல்லது குறைந்த செட்பாயிண்ட் அமைப்புகள், இதில் தானாகவே கட்டுப்படுத்தப்படும் மதிப்பு மாறாமல் இருக்கும். இவை உறுதிப்படுத்தல் அமைப்புகள், இவை அடிப்படையில் தானியங்கி கட்டுப்பாட்டு அமைப்புகள் (ACS),
-
ஒரு குறிப்பிட்ட, முன்னரே தீர்மானிக்கப்பட்ட திட்டத்தின் படி இலக்கு மதிப்பு மாற்றப்படும் அமைப்புகள். இது ஒரு மென்பொருள் மேலாண்மை அமைப்பு,
-
கொடுக்கப்பட்ட மதிப்பு பரவலாக மற்றும் தன்னிச்சையான சட்டத்தின் படி மாறுபடும் அமைப்புகள், அதாவது. கண்காணிப்பு அமைப்புகள்.