பல இடங்களில் இருந்து மின்சார இயக்கி கட்டுப்பாட்டு திட்டங்கள்
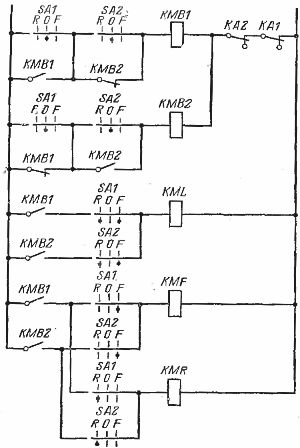
 தொடர்ச்சியான செயல்முறைக் கோடுகளுக்கு, இயக்கிகள் முக்கியமாக ஒரு திசையில் (முன்னோக்கி) செயல்படுகின்றன மற்றும் தலைகீழ் மாற்றங்கள் அரிதானவை, பிரேக்கர் மூலம் "முன்னோக்கி" செயல்பாட்டிற்கு ஒரு வரி தொடர்பைச் சேர்ப்பதன் மூலம் சுற்று (படம் 1) பயன்படுத்த பரிந்துரைக்கப்படுகிறது, மேலும் "தலைகீழ்" செயல்பாட்டிற்கு - KMR தொடர்புகொள்பவரின் தொடர்புகளை செயல்படுத்துவதன் மூலம். இந்த ஏற்பாடு விருப்பமான திசையில் இயக்கி தொடங்கும் நேரத்தை குறைக்கிறது.
தொடர்ச்சியான செயல்முறைக் கோடுகளுக்கு, இயக்கிகள் முக்கியமாக ஒரு திசையில் (முன்னோக்கி) செயல்படுகின்றன மற்றும் தலைகீழ் மாற்றங்கள் அரிதானவை, பிரேக்கர் மூலம் "முன்னோக்கி" செயல்பாட்டிற்கு ஒரு வரி தொடர்பைச் சேர்ப்பதன் மூலம் சுற்று (படம் 1) பயன்படுத்த பரிந்துரைக்கப்படுகிறது, மேலும் "தலைகீழ்" செயல்பாட்டிற்கு - KMR தொடர்புகொள்பவரின் தொடர்புகளை செயல்படுத்துவதன் மூலம். இந்த ஏற்பாடு விருப்பமான திசையில் இயக்கி தொடங்கும் நேரத்தை குறைக்கிறது.
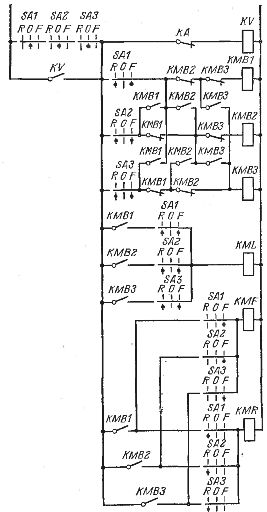
அத்தியில் உள்ள வரைபடம். 2 நகரும் பொருளிலிருந்து மின்சார மோட்டாரை ரிமோட் ரிவர்சிபிள் கட்டுப்பாட்டை அனுமதிக்கிறது. இந்த சுற்று பயன்படுத்தப்படுகிறது, உதாரணமாக, கிரேன் இருந்து வெப்பமூட்டும் கிணறு கவர்கள் மோட்டார்கள் கட்டுப்படுத்த. சமிக்ஞை சுற்றுகள் மற்றும் பல்வேறு சமிக்ஞைகளின் வரவேற்பு படம் காட்டப்பட்டுள்ளது. 3 - 9.
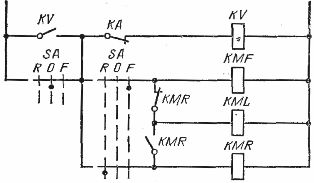
அரிசி. 1. அரிதான பின்புற «பின்புற» கொண்ட பின்புற இயந்திர கட்டுப்பாட்டு திட்டம்.
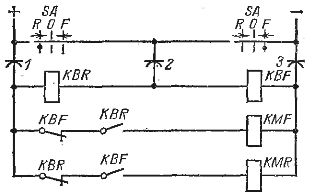
அரிசி. 2. கட்டுப்பாட்டு பூதம் மூலம் மோட்டாரின் மீளக்கூடிய கட்டுப்பாட்டின் திட்டம்.
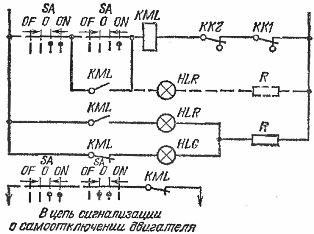
அரிசி. 3. மீளமுடியாத மின்சார இயக்ககத்தின் நிலையை சமிக்ஞை செய்வதற்கான திட்டம்.
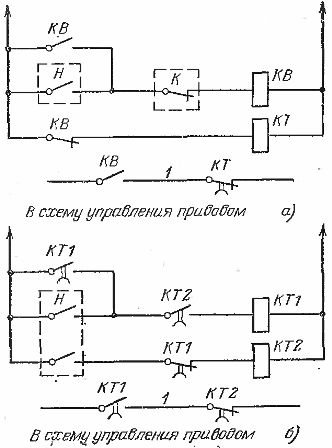
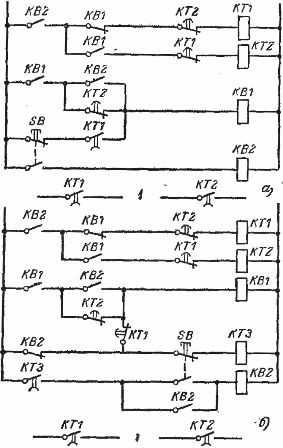
அரிசி. 4.நீண்ட (அ) மற்றும் துடிப்புள்ள (பி) சிக்னலுக்கு வெளிப்பாடு தொடங்கிய பிறகு நேர தாமதத்துடன் சிக்னலைப் பெறுவதற்கான சுற்றுகள்: கே - திறத்தல் தொடர்பு, 1 - டிரைவின் கட்டுப்பாட்டு சுற்றுக்கான தொடர்புகள்.
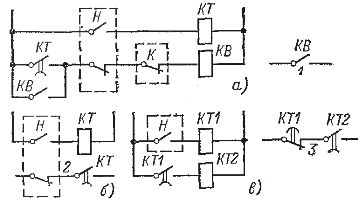
அரிசி. 5. சிக்னல் எச் லாங் (அ), துடிப்பு (பி), நேர தாமதத்துடன் கூடிய துடிப்பு (சி) இன் பீட் (வால் இருந்து) முடிந்த பிறகு ஒரு சமிக்ஞையைப் பெறுவதற்கான திட்டங்கள். கே - திறத்தல் தொடர்பு, 1, 2, 3 - டிரைவ் கட்டுப்பாட்டு சுற்றுக்கான தொடர்புகள்.
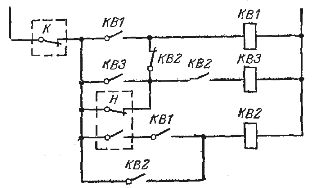
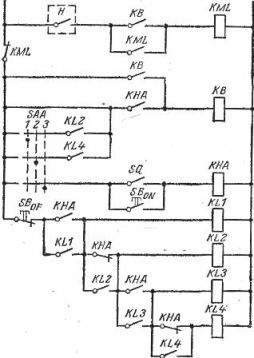
அரிசி. 6. இரண்டாம் நிலை H இன் தொடக்கத்திற்குப் பிறகு நீண்ட சமிக்ஞையைப் பெறுவதற்கான திட்டம்.
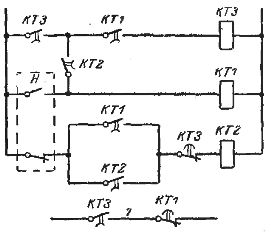
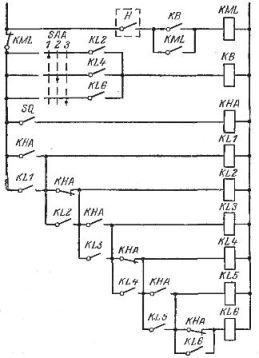
அரிசி. 7. சிக்னல் எச் (KT1 என்பது 0.2-0.8 s; KT2 0.3 s; KTZ 0.5 கள்) இரண்டாம் நிலை நடவடிக்கைக்குப் பிறகு நேர தாமதத்துடன் ஒரு துடிப்பு சமிக்ஞையைப் பெறுவதற்கான திட்டம். 1 - இயக்கி கட்டுப்பாட்டு சுற்றுக்கான தொடர்புகள்.
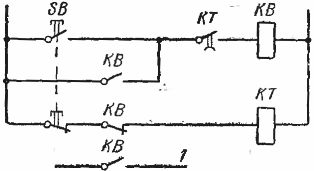
அரிசி. 8. பொத்தானை அழுத்தும் காலத்தைப் பொருட்படுத்தாமல், ஒரு குறிப்பிட்ட காலத்திற்கான சமிக்ஞையைப் பெறுவதற்கான திட்டம்: 1 - டிரைவ் கட்டுப்பாட்டு சுற்றுக்கு தொடர்பு கொள்ளவும்.
குறிப்பிட்ட எண்ணிக்கையிலான செயல்பாடுகள் அல்லது சுழற்சிகளை எண்ணிய பிறகு இயக்ககத்தை தானாகவே பாதிக்க எண்ணும் திட்டங்கள் பயன்படுத்தப்படுகின்றன. அவர்கள் மூடல்கள் மற்றும் திறப்புகளை (படம் 10), மூடல்கள் மட்டுமே (படம் 11) அல்லது திறப்புகளை மட்டுமே (படம் 12) எண்ணலாம்.
சுட்டிக்காட்டப்பட்ட திட்டங்களின்படி எண்ணும் பருப்பு வகைகள் புகைப்பட ரிலே தொடர்புகள், மோஷன் சுவிட்சுகள் அல்லது பிற சாதனங்களிலிருந்து வழங்கப்படுகின்றன.
படத்தில் காட்டப்பட்டுள்ள எண்ணும் திட்டத்தில். 10, REV850 ரிலே ஆர்மேச்சரின் காந்த "ஒட்டுதல்" உடன் பயன்படுத்தப்படுகிறது, எனவே இந்த சுற்றுக்கு மின்னழுத்த விநியோகத்தில் குறுக்கீடு எண்ணுவதைத் தொந்தரவு செய்யாது. மற்ற எண்ணும் சுற்றுகளில், மின்னழுத்தம் தடைபடும் போது, துடிப்பு எண்ணிக்கை இழப்பு ஏற்படுகிறது.
கணக்குத் திட்டத்தின் செல்லுபடியை சரிபார்க்க (படம் 11), கட்டுப்பாட்டு பொத்தான்கள்… ஒவ்வொரு முறையும் நீங்கள் SB0N பொத்தானை அழுத்தும்போது, சுற்று ஒரு எண்ணிக்கையைச் செய்கிறது. கவுண்டரை மீட்டமைக்க SB0F பொத்தான் பயன்படுத்தப்படுகிறது.இத்தகைய பொத்தான்கள் மற்ற திட்டங்களிலும் வழங்கப்படலாம்.
அரிசி. 9. ஒரு பொத்தானைத் தொடர்ந்து அழுத்துவதன் மூலம் இரண்டு வெவ்வேறு சுற்றுகளில் சிக்னல்களைப் பெறுவதற்கான சுற்றுகள்: a — சிக்னலின் காலம் பொத்தானை அழுத்தும் காலத்திற்கு சமம், b — சிக்னலின் காலம் பொத்தானை அழுத்தும் காலத்தைப் பொறுத்தது அல்ல. , 1 - இயக்கி கட்டுப்பாட்டு சுற்றுக்கான தொடர்புகள்.
அரிசி. 10. இரண்டு வரையிலான கணக்கின் திட்டம்.
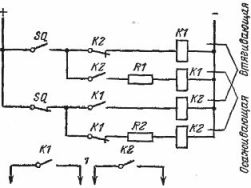
ஒவ்வொரு எண்ணுக்கான பருப்புகளும் ஒரு மூடுதல் மற்றும் வரம்பு சுவிட்ச் SQ இன் தொடர்பின் ஒரு திறப்பு ஆகும்; 1 - இயக்கி கட்டுப்பாட்டு சுற்றுக்கான தொடர்புகள்.
அத்திப்பழத்தின் சுற்றுகளில் பருப்புகளை எண்ணுதல். 11, 12 என்பது SQ தொடர்பின் குறுகிய கால மூடல்கள் (திறப்புகள்), மேலும் இந்த தொடர்பின் மூடிய நிலை உந்துவிசை தொடர்பாளர் KNA மற்றும் ஒரு ரிலே KB (KL) ஐ இயக்க போதுமானதாக இருக்க வேண்டும்.
அரிசி. 11. தொடர்பு SQ மூடப்படும் போது மூன்றாக எண்ணுவதற்கான திட்டம்.
அரிசி. 12. SQ தொடர்பைத் திறக்கும்போது மூன்றாக எண்ணுவதற்கான திட்டம்
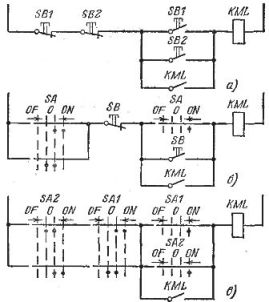
அரிசி. 13. இரண்டு இடங்களிலிருந்து இயந்திரத்தின் மீளமுடியாத கட்டுப்பாட்டின் திட்டங்கள்: a - இரண்டு பொத்தான்கள், b - ஒரு பொத்தான் மற்றும் ஒரு முக்கிய, c - இரண்டு விசைகளுடன்.
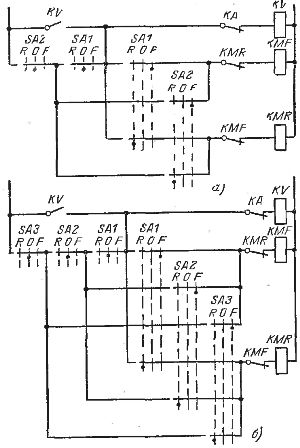
அரிசி. 14. இரண்டு இடங்களிலிருந்து ஒரு மின்சார இயக்ககத்தின் ஒரு பக்க சார்பு மீளக்கூடிய கட்டுப்பாட்டின் திட்டம்.
KML லைன் கான்டாக்டரால் எண்ணிக்கை மீட்டமைக்கப்பட்டது; SQ தொடர்பாளரின் மூடிய நேரம் KML தொடர்புகொள்பவரின் நேரத்தை விட குறைவாக இருக்க வேண்டும்.
சற்றே பெரிய எண்ணுக்கான எண்ணும் திட்டங்களை மேலே உள்ள திட்டங்களுடனான ஒப்புமை மூலம் வரையலாம், ஆனால் எண்ணிக்கை ஐந்து அல்லது எட்டுக்கு மேல் இருக்கும் போது அல்லது மின்னழுத்தம் மறையும் போது எண்ணும் இழப்பு ஏற்றுக்கொள்ள முடியாத சந்தர்ப்பங்களில், எண்ணைப் பயன்படுத்த பரிந்துரைக்கப்படுகிறது. ரிலேக்கள்.
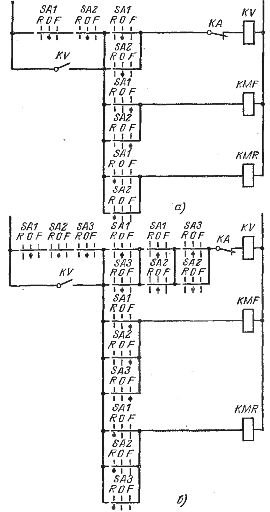
அரிசி. 15. சார்பு மீளக்கூடிய இயந்திர கட்டுப்பாட்டின் திட்டங்கள்: a - இரண்டு இடங்களிலிருந்து, b - மூன்று இடங்களிலிருந்து
ஒரு வகை E-526 மோட்டார் ஸ்டெப் கவுண்ட் ரிலே 30 எண்ணிக்கைகள் வரை அல்லது ஒரு வகை E 531 துடிப்பு எண்ணிக்கை ரிலே 75 துடிப்பு எண்ணிக்கைகள் வரை பயன்படுத்தப்படலாம். ரிலேக்கள் மாற்று மின்னோட்டத்தில் இயங்குகின்றன மற்றும் அவற்றின் தொடர்புகள் முறையே 220 V இல் பவர்-ஆஃப் செய்யும். மற்றும் DC 50 மற்றும் 30 வாட்ஸ்.
பல இடங்களில் இருந்து மின்சார மோட்டார்கள் கட்டுப்பாட்டு சுற்றுகள் சார்ந்து இருக்க முடியும், ஒரே திசையில் சார்ந்து மற்றும் சுயாதீனமான (படம். 13). பெரும்பாலும், சார்பு கட்டுப்பாட்டு திட்டங்கள் எளிமையானவையாக (படம் 15) பயன்படுத்தப்படுகின்றன. இந்த திட்டங்களின்படி, எந்தவொரு கட்டுப்பாட்டு சாதனத்தையும் இயக்கும்போது, மற்றொரு சாதனத்தின் கைப்பிடியை பூஜ்ஜியத்திலிருந்து இயக்க நிலைக்கு நகர்த்துவது மோட்டார் நிறுத்தப்படுவதற்கு காரணமாகிறது.
இரண்டு (படம். 14) மற்றும் மூன்று (படம். 16) இடங்களிலிருந்து ஒரு வழி சார்ந்த கட்டுப்பாட்டின் திட்டங்களின்படி, சுவிட்ச் SA2 (SA2 மற்றும் SA3) ஸ்விட்ச் SA2 இன் நிலையில் இருந்து சுயாதீனமாக கட்டுப்படுத்த முடியும். SA1 சுவிட்ச் பூஜ்ஜிய நிலையில் இருக்கும்போது SA2 சுவிட்சின் கட்டுப்பாடு சாத்தியமாகும் மற்றும் SA3 சுவிட்சின் நிலையைச் சார்ந்து இருக்காது. SA1 மற்றும் SA2 சுவிட்சுகள் பூஜ்ஜிய நிலையில் இருக்கும்போது SA3 சுவிட்சுகளின் கட்டுப்பாடு சாத்தியமாகும்.
படம் 16. மூன்று-இட பரஸ்பர மோட்டாரின் ஒரே திசை சார்ந்த கட்டுப்பாட்டின் திட்டம்
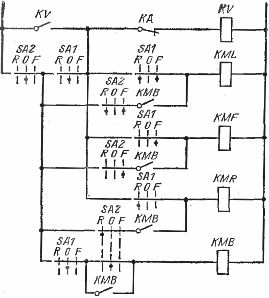
அரிசி. 17. இரண்டு இடங்களிலிருந்து இயந்திரத்தின் சுயாதீனமான மீளக்கூடிய கட்டுப்பாட்டின் திட்டம்.
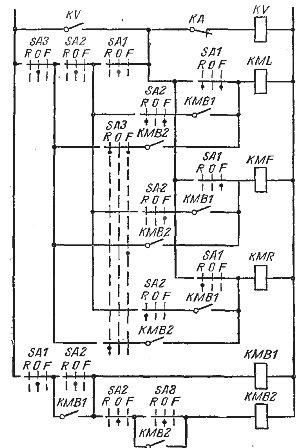
அரிசி. 18. மூன்று இடங்களிலிருந்து இயந்திரத்தின் சுயாதீன மீளக்கூடிய கட்டுப்பாட்டின் திட்டம்.
சுயாதீன கட்டுப்பாட்டு திட்டங்களில் (படங்கள் 17 மற்றும் 18), இயக்கி எந்த முதல் சுவிட்ச் (SA1, SA2 அல்லது SA3) மூலம் கட்டுப்படுத்தப்படும் போது, மற்ற சுவிட்சின் கைப்பிடியை நகர்த்துவது இயக்ககத்தின் செயல்பாட்டை பாதிக்காது. முதல் விசையின் கைப்பிடியின் பூஜ்ஜிய நிலைக்குத் திரும்பிய பிறகு, இரண்டாவது விசையின் (அல்லது வேறு இரண்டு) கைப்பிடியின் நிலையைப் பொருட்படுத்தாமல் ஆக்சுவேட்டர் நிறுத்தப்படும். இரண்டாவது விசையை (அல்லது மற்ற இரண்டு) பூஜ்ஜிய நிலைக்குத் திரும்பிய பின்னரே புதிய தொடக்கம் சாத்தியமாகும்.
மிக பெரும்பாலும் அவர்கள் ஒரு எளிமைப்படுத்தப்பட்ட திட்டத்தின் படி இரண்டு மற்றும் மூன்று இடங்களிலிருந்து இயக்கி கட்டுப்பாட்டைப் பயன்படுத்துகின்றனர் (படம் 19); அதாவது ஒரே ஒரு முதல் இடத்திலிருந்து முன்னுரிமை கட்டுப்பாடு (விசை SA1). இயக்கி மற்றொரு சுவிட்ச் (SA2 அல்லது SA3) மூலம் கட்டுப்படுத்தப்படும் போது, பூஜ்ஜிய நிலையில் இருந்து முதல் சுவிட்சின் கைப்பிடியை நகர்த்துவதால், அந்த சுவிட்சுக்கு கட்டுப்பாடு மாற்றப்படும்.
அரிசி. 19. மீளக்கூடிய மின்சார இயக்ககத்தை கட்டுப்படுத்துவதற்கான எளிமையான திட்டங்கள்: a - இரண்டு இடங்களிலிருந்து, b - மூன்று இடங்களிலிருந்து.