நேரத்தின் செயல்பாடாக தானியங்கி கட்டுப்பாட்டு சுற்றுகளின் முனைகள்
 மின்காந்த, மின்னணு, மோட்டார் மற்றும் எலக்ட்ரோநியூமேடிக் ஆகியவை ஆட்டோமேஷன் சர்க்யூட்களில் பரவலாகப் பயன்படுத்தப்படுகின்றன. நேர ரிலே... மிகவும் பொதுவான சமிக்ஞை கால மாற்ற திட்டங்கள் அத்தி காட்டப்பட்டுள்ளன. 1. வரைபடம் அத்தி. 1, மற்றும் அழுத்தும் காலத்தைப் பொருட்படுத்தாமல், ஒரு குறிப்பிட்ட காலத்தின் துடிப்பை வழங்குகிறது பொத்தான்கள் எஸ்.பி. SB பொத்தானை அழுத்திய பிறகு, ரிலே K செயல்படுத்தப்படுகிறது, இது பொறிமுறையை இயக்க ஒரு உத்வேகத்தை அளிக்கிறது. துடிப்பின் காலம் KT ரிலேவின் நேர தாமதத்தால் தீர்மானிக்கப்படுகிறது. SB பொத்தானை KQ கட்டளை ரிலே மூலம் மாற்றலாம்.
மின்காந்த, மின்னணு, மோட்டார் மற்றும் எலக்ட்ரோநியூமேடிக் ஆகியவை ஆட்டோமேஷன் சர்க்யூட்களில் பரவலாகப் பயன்படுத்தப்படுகின்றன. நேர ரிலே... மிகவும் பொதுவான சமிக்ஞை கால மாற்ற திட்டங்கள் அத்தி காட்டப்பட்டுள்ளன. 1. வரைபடம் அத்தி. 1, மற்றும் அழுத்தும் காலத்தைப் பொருட்படுத்தாமல், ஒரு குறிப்பிட்ட காலத்தின் துடிப்பை வழங்குகிறது பொத்தான்கள் எஸ்.பி. SB பொத்தானை அழுத்திய பிறகு, ரிலே K செயல்படுத்தப்படுகிறது, இது பொறிமுறையை இயக்க ஒரு உத்வேகத்தை அளிக்கிறது. துடிப்பின் காலம் KT ரிலேவின் நேர தாமதத்தால் தீர்மானிக்கப்படுகிறது. SB பொத்தானை KQ கட்டளை ரிலே மூலம் மாற்றலாம்.
வரைபடங்கள் படம். 8, b (மின்காந்த நேர ரிலேவுடன்) மற்றும் அத்தி. 1, c (எலக்ட்ரோநியூமேடிக் அல்லது மோட்டார் பொருத்தப்பட்ட நேர ரிலேவுடன்) பயண சுவிட்ச் SQ இன் நடவடிக்கையின் தொடக்கத்திற்குப் பிறகு ஒரு குறுகிய கால துடிப்பு வழங்க பயன்படுத்தப்படுகிறது. இந்த மற்றும் அடுத்தடுத்த திட்டங்களில், தொடர்புகளுக்கு பதிலாக இயக்க சுவிட்ச் KQ ரிலே தொடர்புகளைப் பயன்படுத்தலாம்.
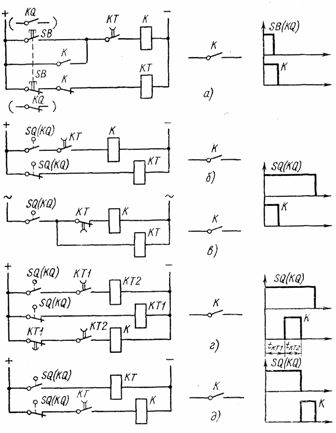
அரிசி. 1. சிக்னல்களின் கால அளவை மாற்றுவதற்கான சுற்றுகள்
திட்டம் அத்தி.1d ஆனது tKT2 கால அளவு tKT2 இன் துடிப்பை வழங்குகிறது, SQ ஸ்விட்ச் செயல்பாட்டின் தொடக்கத்திற்குப் பிறகு tKT1 நேர தாமதத்துடன்.
சுற்று முனை படம். 1, e. இந்த துடிப்பு பயன்படுத்தப்படுவதற்கு முன் ஒரு நேர தாமதம் tKT1 தேவைப்பட்டால், அத்தியில் உள்ள சுற்று. 1, இ. துடிப்பு கால அளவு tKT2.
நிலை கட்டுப்பாட்டு சுற்றுகளில், படம். 1g, இது ட்ரிப் சுவிட்ச் SQ இல் தாக்கம் முடிந்த பிறகு நீண்ட கட்டளையை வழங்கும் செயல்பாட்டைச் செய்கிறது. SQ சுவிட்சில் ஒரு புதிய செயலின் தொடக்கத்தில் கட்டளை ரத்து செய்யப்படுகிறது.
வழக்கமான முறையில் ஆன் மற்றும் ஆஃப் செய்வதன் மூலம் குறுகிய கால தாமதத்தை (1.5 நொடி வரை) பெறலாம். இடைநிலை ரிலேக்கள் மின்தேக்கிகள் அல்லது டையோட்களுடன் அவற்றின் சுருள்களின் shunting காரணமாக.
அத்தி வரைபடத்தில். 2, மற்றும் தொடர்பு KQ மூடப்படும் போது, மின்தேக்கி C இன் சார்ஜிங் நேரத்தால் நிர்ணயிக்கப்பட்ட நேர தாமதத்துடன் ரிலே K செயல்படுத்தப்படுகிறது. KQ மூடப்படும் போது, மின்தேக்கியின் வெளியேற்றம் காரணமாக ரிலே K ஆனது தாமதத்துடன் திரும்பும்.

அரிசி. 2. மின்தேக்கிகள் அல்லது டையோட்களுடன் இடைநிலை ரிலேக்களின் சுருள்களை நிறுத்துவதன் மூலம் நேர தாமதங்களைப் பெறுதல்
ரிலே இயக்கத்தில் இருக்கும்போது மட்டுமே நேர தாமதத்தைப் பெற, படத்தில் உள்ள சர்க்யூட்டைப் பயன்படுத்தவும். 2, பி. ரிலே அணைக்கப்படும் போது தாமதம் நடைமுறையில் இல்லை, ஏனெனில் மின்தேக்கி விரைவாக மின்தடையம் R க்கு வெளியேற்றப்படுகிறது (தடை R இன் எதிர்ப்பு ரிலே சுருள் K இன் எதிர்ப்பை விட கணிசமாக குறைவாக உள்ளது). இதேபோன்ற சிக்கல் அத்திப்பழத்தில் உள்ள சுற்று மூலம் தீர்க்கப்படுகிறது. 2c, இது KQ ரிலேயின் ஒரு தொடக்க தொடர்பைப் பயன்படுத்துகிறது. இந்த சுற்றுவட்டத்தின் குறைபாடு ஒரு சமிக்ஞை இல்லாத நிலையில் மின்தடையத்தின் மூலம் ஆற்றல் குறிப்பிடத்தக்க இழப்பு ஆகும்.
படத்தில் உள்ள திட்டம். 2d, தொடர்பு KQ திறக்கும் போது, மின்தடை R ஆல் கட்டுப்படுத்தப்படும் நேர தாமதத்துடன் ரிலே K அணைக்கப்படும்.
படத்தில் உள்ள வரைபடத்தின் படி. 2, e கட்டளை ரிலே KQ இன் தொடர்பு மூடப்பட்ட பிறகு K அணைக்கப்படும் போது நேர தாமதம் உருவாக்கப்படுகிறது.
கட்டளை ரிலே KQ செயல்படுத்தப்படும் போது ரிலே K திரும்புவதில் சிறிது தாமதம் தேவைப்பட்டால், படம் படம். 2, e, இதில் ரிலே K இன் சுருள் ஒரு டையோடு மூலம் மாற்றப்படுகிறது.
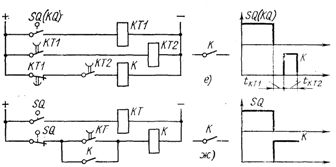
கொடுக்கப்பட்ட கால அளவு மற்றும் கடமை சுழற்சியின் பருப்புகளை உருவாக்குவதற்கான திட்டம் படம் காட்டப்பட்டுள்ளது. 3, ஏ. துடிப்பின் காலம் KT2 ரிலேயின் நேர தாமதத்தால் தீர்மானிக்கப்படுகிறது, இடைநிறுத்தம் KT1 ரிலேவின் தாமத நேரத்தால் தீர்மானிக்கப்படுகிறது.
அரிசி. 3. பருப்புகளை உருவாக்குவதற்கான ரிலே சுற்றுகள்
அத்திப்பழத்தில். 3, b, நீட்டிக்கப்பட்ட இடைநிறுத்த நேரத்துடன் பொறிமுறையின் காலமுறை மாறுதலின் வரைபடம் கொடுக்கப்பட்டுள்ளது. தொடர்புகொள்பவர் KM இன் ஸ்விட்ச்-ஆன் நேரம் ரிலே KT1 இன் நேர தாமதத்திற்கு சமம், இடைநிறுத்தத்தின் காலம் தொகை ரிலே KT2 மற்றும் KTZ இன் தாமதங்கள். நேர வரைபடம் படம் காட்டப்பட்டுள்ளது. 3, சி.
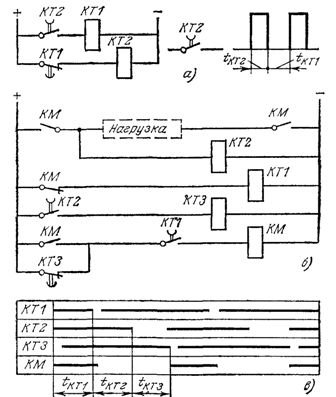
நேர ரிலேகளின் துடிப்பு ஜெனரேட்டர்களின் திட்டங்கள் அல்லது தருக்க கூறுகள் (கீழே காண்க) நேரியல் பொறிமுறைகளின் செயல்பாட்டின் வேகத்தைக் கட்டுப்படுத்தவும் பயன்படுத்தப்படுகின்றன. இன்ஜின் டைமிங் ரிலே போன்ற பல வழிகளில் KEP-12U கட்டளை சாதனத்தைக் கொண்ட வெப்பநிலை கட்டுப்படுத்தி பரவலாக மாறியது. யூனிட்டில் எக்ஸிகியூட்டிவ் மோட்டார், மாறி கியர்கள், கேம் டிரம், சுவிட்ச் மற்றும் 12 தொடர்புகள் உள்ளன.
வேகக் கட்டுப்பாட்டாளர்கள் பொதுவாக KEP-12U சாதனத்தின் சுழற்சி செயல்பாட்டிற்கான திட்டத்தைப் பயன்படுத்துகின்றனர் (படம் 4, a). ரிலேக்கள் K1 மற்றும் K2 மற்றும் கட்டளை சாதனம் KT.1 மற்றும் KT.2 ஆகியவற்றின் தொடர்புகளைப் பயன்படுத்தி சுற்று செய்யப்படுகிறது, இதன் சுற்று வரைபடம் படம் காட்டப்பட்டுள்ளது. 4, பி.
வேலையைத் தொடங்குவதற்கு முன், S சுவிட்சை இயக்கவும்.KQ ரிலே தொடர்பு சுருக்கமாக மூடப்பட்டு, கடமைச் சுழற்சியைத் தொடங்குவதற்கான கட்டளையை வழங்கும் போது, K1 ரிலே ஆற்றல்பெற்று, சுயமாகப் பிணைக்கப்படுகிறது. ரிலே K2 கட்டளை சாதனம் KT ஐ இயக்குவதன் மூலம் செயல்படுத்தப்படுகிறது. மோட்டார் முறுக்குகள் எல்எம்1 மற்றும் எல்எம்2 ஆகியவை உற்சாகப்படுத்தப்பட்டு, கேம் டிரம் சுழலத் தொடங்குகிறது. சாதனத்தின் KT.3, KT.4, முதலியவற்றின் வெளியீட்டுத் தொடர்புகள், வரிசையாக மூடப்படும், நேரம் அமைக்கப்பட்ட தருணங்களில் (படம் 4, b இல் உள்ள வரைபடத்தைப் பார்க்கவும்) நேரியல் வழிமுறைகளை இயக்க கட்டளைகளை வழங்குகின்றன. சுழற்சியின் நடுவில், தொடர்பு KT.1 திறக்கிறது மற்றும் ரிலே K1 அணைக்கப்படும்.
படம் 4. KEP-12U சாதனத்துடன் கூடிய வரி வேகக் கட்டுப்படுத்தி
ரிலே சுருள் K2 ஆனது KT.2 சாதனத்தின் தொடர்பு மூலம் மின்சாரம் வழங்குவதை ஆதரிக்கிறது. 360 ° கோணத்தில் டிரம் சுழற்றிய பிறகு, தொடர்பு KT.2 திறக்கிறது, KEP-12U சாதனத்தின் மோட்டார் நிறுத்தப்படும். சங்கிலி அடுத்த சுழற்சிக்கு தயாராக உள்ளது.
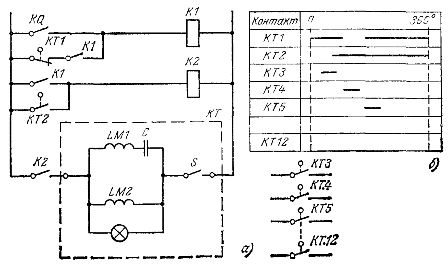
முடிவில், மின்காந்த நேர ரிலேக்களின் தாமதத்தின் ரிமோட் கண்ட்ரோலுக்கான இரண்டு திட்டங்களை நாங்கள் கருத்தில் கொள்வோம்.
கண்ட்ரோல் பேனலில் இருந்து தாமதத்தை மாற்ற, தூண்டுதல் சுருள்கள் KT.1 மற்றும் ரிட்டர்ன் காயில்கள் KT உடன் இரண்டு-சுருள் ரிலே சர்க்யூட்டைப் பயன்படுத்தலாம். 2 (டிமேக்னடைசேஷன்), அதன் MDS எதிர் திசையில் இயக்கப்படுகிறது (படம் 5, a). வெளியீட்டுச் சுருளின் MDS ஆனது RP பொட்டென்டோமீட்டரைப் பயன்படுத்தி சரிசெய்யப்படுகிறது. காந்தமயமாக்கல் தலைகீழாகத் திரும்பிய பிறகு CT மீண்டும் மீண்டும் செயல்படுவதைத் தவிர்க்க, ட்ரிப்பிங் சுருளின் MDS ஆனது ஆர்மேச்சரை இழுக்க போதுமான MDS ஐ விட குறைவாக இருக்க வேண்டும் அல்லது சுற்றுச் சுருளில் அதன் சொந்த ரிலே மூடும் தொடர்பை அறிமுகப்படுத்த வேண்டும் (படம் 1). 5, அ).
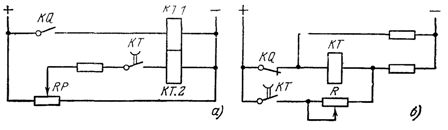
படம் 5. நேர ரிலே தாமதத்தின் தொலைநிலை சரிசெய்தலுக்கான திட்டங்கள்
படத்தில் உள்ள வரைபடத்தின் படி.5, b ஒற்றை சுருள் ரிலேயின் நேர தாமதத்தில் ரிமோட் மாற்றத்தை ஏற்படுத்தவும். தொடர்பு KQ திறக்கும் போது, ரிலே சுருள் KT ஆனது மின்தடையம் R ஆல் கட்டுப்படுத்தப்படும் ஒரு degaussing மின்னோட்டத்துடன் பாய்கிறது. டிகாசிங் மின்னோட்டம் அதிகரிக்கும் போது, ரிலேவின் தாமதம் குறைகிறது மற்றும் நேர்மாறாகவும். 220 V இன் விநியோக மின்னழுத்தத்துடன், 110 V இன் பெயரளவு மின்னழுத்தத்திற்கான சுருளுடன் ஒரு ரிலே பயன்படுத்தப்படுகிறது.