நேரத்தின் செயல்பாடாக மோட்டார் கட்டுப்பாட்டு சுற்றுகள்
 மின்சார மோட்டரின் மின்சுற்றில் உள்ள அனைத்து மாறுதல்களும் குறிப்பிட்ட தருணங்களில் நிகழும்போது இந்த வகை கட்டுப்பாடு பயன்படுத்தப்படுகிறது, எடுத்துக்காட்டாக, வேகம் அல்லது மின்னோட்டத்தை கண்காணிக்காமல் மின்சார மோட்டார்கள் தொடங்கும் செயல்முறையை தானியங்குபடுத்தும் போது. இடைவெளிகளின் காலம் தீர்மானிக்கப்படுகிறது மற்றும் நேர ரிலே அமைப்புகளால் சரிசெய்யப்படலாம்.
மின்சார மோட்டரின் மின்சுற்றில் உள்ள அனைத்து மாறுதல்களும் குறிப்பிட்ட தருணங்களில் நிகழும்போது இந்த வகை கட்டுப்பாடு பயன்படுத்தப்படுகிறது, எடுத்துக்காட்டாக, வேகம் அல்லது மின்னோட்டத்தை கண்காணிக்காமல் மின்சார மோட்டார்கள் தொடங்கும் செயல்முறையை தானியங்குபடுத்தும் போது. இடைவெளிகளின் காலம் தீர்மானிக்கப்படுகிறது மற்றும் நேர ரிலே அமைப்புகளால் சரிசெய்யப்படலாம்.
வெகுஜன உற்பத்தி மின்காந்த மற்றும் மின்னணு நேர ரிலேக்களின் எளிமை மற்றும் நம்பகத்தன்மை காரணமாக நேரக் கட்டுப்பாடு தொழில்துறையில் மிகப்பெரிய பரவலைப் பெற்றது.
எனவே, அத்திப்பழத்திலிருந்து. 1, a மற்றும் b, லைன் கான்டாக்டரின் தொடர்பு K ஐ மூடுவதன் மூலம், Rheostat இன் முழு எதிர்ப்பும் ஆர்மேச்சர் சர்க்யூட்டில் சேர்க்கப்பட்டுள்ளது, R1 + R2 + R3 க்கு சமம், மற்றும் தொடக்க எதிர்ப்புப் பிரிவுகளைச் சேர்ப்பது குறிப்பிட்ட நேர இடைவெளியில் t1, t2 மற்றும் t3 சில எஞ்சின் வேகத்தில் n1, n2, n3 மற்றும் இன்ரஷ் மின்னோட்டம் செட் மதிப்பு I2க்கு குறையும் போது நிகழலாம். நேர இடைவெளிகள் தேர்ந்தெடுக்கப்படுகின்றன, இதனால் எதிர்ப்பின் ஒவ்வொரு அடுத்தடுத்த குறுகிய சுற்றுகளிலும், மோட்டார் மின்னோட்டம் அனுமதிக்கப்பட்ட I1 ஐ விட அதிகமாக இல்லை.
மோட்டார் n = 0 இலிருந்து n1 க்கு முடுக்கிவிடும்போது, பின்புற மின்னோட்ட விசையின் அதிகரிப்பின் விளைவாக மின்னோட்டம் I2 ஆக குறைகிறது. ஒரு நேர இடைவெளிக்குப் பிறகு t1, தொடர்பு K1 மூடுகிறது, எதிர்ப்பு R1 ஐ மூடுகிறது, இது R2 + R3 க்கு rheostat இன் எதிர்ப்பைக் குறைக்க வழிவகுக்கிறது, I1 க்கு மின்னோட்டத்தில் புதிய அதிகரிப்பு போன்றவை. தொடக்கத்தின் முடிவில், மோட்டார் மதிப்பிடப்பட்ட வேகத்திற்கு முடுக்கிவிடப்படுகிறது, தொடக்க rheostat முற்றிலும் அகற்றப்பட்டது.
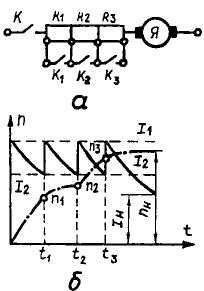
அரிசி. 1. நேரத்தின் செயல்பாடாக மோட்டார் கட்டுப்பாட்டு சுற்றுகள்: a — DC மோட்டார் தொடக்க rheostat, b — தொடக்க வரைபடம்
சில மோட்டார் கட்டுப்பாட்டு சுற்றுகளை நேரத்தின் செயல்பாடாக கருதுங்கள்.
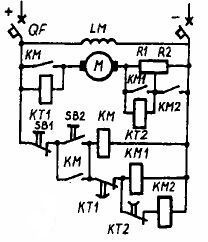
காயம் சுழலி (படம் 2) கொண்ட ஒரு தூண்டல் மோட்டாரின் நேரத்தைச் சார்ந்த கட்டுப்பாட்டில், தொடக்க rheostat இன் குறுகிய-சுற்று தனிப்பட்ட படிகளுக்குத் தேவைப்படும் நேர தாமதமானது ஊசல் நேர ரிலேக்களால் வழங்கப்படுகிறது, அவற்றின் எண்ணிக்கை எண்ணிக்கைக்கு சமம் படிகள். திட்டம் பின்வருமாறு செயல்படுகிறது.
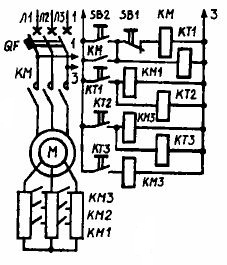
அரிசி. 2. ஒரு காயம்-ரோட்டர் தூண்டல் மோட்டார் நேரத்தின் செயல்பாடாக கட்டுப்பாட்டு சுற்று
நீங்கள் கிளிக் செய்யும் போது பொத்தானை SB1 KM லைனில் உள்ள காண்டாக்டர் காயிலுக்கு சக்தியைப் பெறுகிறது, இது மோட்டார் ஸ்டேட்டரை மெயின்களுடன் இணைக்கிறது. அதே நேரத்தில், வெளியீடு rheostat முழுமையாக அறிமுகப்படுத்தப்பட்டது. காண்டாக்டருடன் சேர்ந்து, நேர ரிலே KT1 இயக்கப்பட்டது, இது ஒரு குறிப்பிட்ட நேர இடைவெளிக்குப் பிறகு தொடர்பு KM1 இன் சுருளின் சுற்றுவட்டத்தில் உள்ள தொடர்பை மூடுகிறது.
தொடர்புகொள்பவர் ரோட்டரைத் தொடங்க rheostat இன் முதல் பகுதியை இயக்கி மூடுகிறார். அதே நேரத்தில், நேர ரிலே KT2 இயக்கப்படுகிறது, இது ஒரு தாமதத்துடன் அதன் தொடர்புகளை மூடுகிறது மற்றும் சுருள் KM2 மற்றும் நேர ரிலே KTZ ஐ இயக்குகிறது. கான்டாக்டரின் தொடர்புகள் KM2 ஷார்ட் சர்க்யூட் தொடக்க rheostat இன் இரண்டாம் நிலை KM2.கூடுதலாக, நேர தாமதத்துடன், KTZ ரிலேயின் தொடர்பு தூண்டப்படுகிறது, KMZ முறுக்கு இயக்கப்படுகிறது, இது KMZ தொடக்க rheostat இன் கடைசி கட்டத்தில் ஒரு குறுகிய சுற்று செய்கிறது, மேலும் மோட்டார் எதிர்காலத்தில் தொடர்ந்து வேலை செய்கிறது. ஒரு அணில் சுழலி.
SB பொத்தானை அழுத்துவதன் மூலம் மோட்டார் நிறுத்தப்படுகிறது, மேலும் அதிக சுமை ஏற்பட்டால், QF சுவிட்சை வெளியிடுவதன் மூலம் மோட்டார் அணைக்கப்படும். இது லைன் கான்டாக்டர், அதன் துணை தொடர்பு KM மற்றும் அனைத்து முடுக்கம் தொடர்பாளர்கள் மற்றும் நேர தாமதம் அல்லாத நேர ரிலேக்களை முடக்குகிறது. சங்கிலி அடுத்த சுழற்சிக்கு தயாராக உள்ளது.
ஸ்டேட்டரை ஒரு நட்சத்திரத்திலிருந்து டெல்டாவிற்கு மாற்றுவதன் மூலம் அதிகரித்த சக்தியுடன் தூண்டல் மோட்டாரின் செயலற்ற வேகத்தைத் தொடங்க, நீங்கள் படத்தில் உள்ள வரைபடத்தைப் பயன்படுத்தலாம். 3. இந்த சர்க்யூட்டில் மாறுவது நேரத்தின் செயல்பாடாக தானாகவே செய்யப்படுகிறது, SB2 பொத்தானை அழுத்துவதன் மூலம், ஸ்டேட்டர் முறுக்கு தொடர்பு KM மூலம் பிணையத்துடன் இணைக்கப்பட்டுள்ளது. அதே நேரத்தில், நேர ரிலே KT மற்றும் சுருள் KY ஆகியவை நெட்வொர்க்குடன் இணைக்கப்பட்டுள்ளன, இது மின்சுற்றில் மூன்று தொடர்புகளைப் பயன்படுத்தி ஒரு நட்சத்திரத்துடன் ஸ்டேட்டர் முறுக்கு இணைக்கிறது.
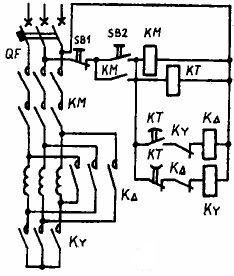
அரிசி. 3. Y இலிருந்து Δ க்கு மாறுவதன் மூலம் தூண்டல் மோட்டார் நேரத்தின் செயல்பாடாக கட்டுப்பாட்டு சுற்று
குறைக்கப்பட்ட மின்னழுத்தத்தில் மோட்டார் தொடங்குகிறது மற்றும் துரிதப்படுத்துகிறது. முன்னரே தீர்மானிக்கப்பட்ட நேர இடைவெளிக்குப் பிறகு, KT ரிலே KY கான்டாக்டரை அணைத்து, ஸ்டேட்டர் முறுக்கை டெல்டாவுடன் இணைக்கும் KΔ காண்டாக்டரின் சுருளை இயக்குகிறது. கே
மல்டி-ஸ்பீட் இண்டக்ஷன் மோட்டார்களை படிப்படியாகத் தொடங்குவது மிகவும் சிக்கனமானது மற்றும் நேரத்தின் செயல்பாடாக செய்யப்படுகிறது.ஒற்றை முறுக்கு (படம் 4) கொண்ட இரண்டு-வேக மோட்டாரின் படிப்படியான தொடக்கத்தின் உதாரணத்தைக் கருத்தில் கொள்வோம். ஸ்டேட்டர் முறுக்கு டெல்டாவிலிருந்து இரட்டை நட்சத்திரத்திற்கு இரட்டை வேகத்தில் செல்கிறது.
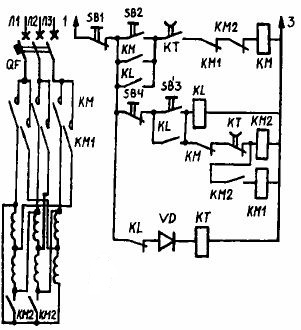
அரிசி. 4. தூண்டல் மோட்டார் படி தொடக்க நேரத்தின் செயல்பாடாக கட்டுப்பாட்டு சுற்று
முதல் வேக நிலைக்குத் தொடர்பாளர் KM ஆல் மோட்டார் இயக்கப்பட்டது, மேலும் KM2 மற்றும் KM1 தொடர்பாளர்களால் இரண்டாவதாக மாற்றப்பட்டது. மோட்டாரை முதல் வேகத்திற்கு இயக்க, SB2 பொத்தானை அழுத்தினால், KM இன் சுருள் மற்றும் அதன் ஆற்றல் முக்கிய சுற்றுகளில் KM உடன் தொடர்பு கொள்கிறது. டெல்டா இணைக்கப்பட்ட ஸ்டேட்டர் முறுக்கு நெட்வொர்க்குடன் இணைக்கப்பட்டுள்ளது. நேர ரிலே KT இன் சுருள் ஆற்றல் பெறுகிறது, மேலும் அதன் மூடும் தொடர்பு (சுருள் KM இன் சர்க்யூட்டில்) மூடப்பட்டுள்ளது.
 சுழற்சியின் இரண்டாவது வேகத்தில் இயந்திரத்தின் படிப்படியான தொடக்கமானது இடைநிலை ரிலே K ஐப் பயன்படுத்தி மேற்கொள்ளப்படுகிறது, இதன் சுற்று தொடக்க பொத்தான் SB3 மூலம் மூடப்பட்டுள்ளது. K மூடும் தொடர்புகள் இரண்டு தொடக்க பொத்தான்களைக் கடந்து செல்கின்றன மற்றும் K திறக்கும் தொடர்பு KT நேர ரிலேவைச் செயலிழக்கச் செய்கிறது. சுருள் KM இன் சர்க்யூட்டில் உள்ள மூடும் தொடர்பு KT திரும்பும் தாமதத்துடன் அணைக்கப்படும், இதன் காரணமாக தொடங்கும் முதல் காலகட்டத்தில் சுருள் KM மூடப்பட்டதாக மாறி முதல் வேகத்தில் மோட்டார் இயக்கப்படும்.
சுழற்சியின் இரண்டாவது வேகத்தில் இயந்திரத்தின் படிப்படியான தொடக்கமானது இடைநிலை ரிலே K ஐப் பயன்படுத்தி மேற்கொள்ளப்படுகிறது, இதன் சுற்று தொடக்க பொத்தான் SB3 மூலம் மூடப்பட்டுள்ளது. K மூடும் தொடர்புகள் இரண்டு தொடக்க பொத்தான்களைக் கடந்து செல்கின்றன மற்றும் K திறக்கும் தொடர்பு KT நேர ரிலேவைச் செயலிழக்கச் செய்கிறது. சுருள் KM இன் சர்க்யூட்டில் உள்ள மூடும் தொடர்பு KT திரும்பும் தாமதத்துடன் அணைக்கப்படும், இதன் காரணமாக தொடங்கும் முதல் காலகட்டத்தில் சுருள் KM மூடப்பட்டதாக மாறி முதல் வேகத்தில் மோட்டார் இயக்கப்படும்.
சுருள் KM2 மற்றும் KM1 சுற்றுவட்டத்தில் KM தொகுதியின் தொடர்பு திறக்கிறது. இந்த சுருள்கள் திறந்த தொடர்பு KT இலிருந்து துண்டிக்கப்படுகின்றன, இது திரும்பும் போது தாமதமாகும். ஒரு குறிப்பிட்ட காலத்திற்குப் பிறகு, மூடும் தொடர்பு KT சுருள் KM ஐ அணைக்கும், மேலும் அதன் தொடக்க தொடர்பு KM1 மற்றும் KM2 சுழற்சியின் இரண்டாவது வேகத்தின் தொடர்புகளின் சுருள்களை இயக்கும். சப்ளை சர்க்யூட்டில் உள்ள அவர்களின் முக்கிய தொடர்புகள் ஸ்டேட்டர் முறுக்கு இரட்டை நட்சத்திரத்திற்கு மாறி, அதை மின்னோட்டத்துடன் இணைக்கும்.
எனவே, எஞ்சின் முதலில் முதல் கியருக்கு முடுக்கிவிட்டு தானாகவே இரண்டாவது கியருக்கு மாறுகிறது. ஸ்டேட்டரின் முறுக்கு இரட்டை நட்சத்திரத்திற்கான பூர்வாங்க இணைப்பு மற்றும் பிணையத்தில் அதைத் தொடர்ந்து சேர்ப்பது மின்சாரம் KM2 இன் இரண்டு மூடும் தொடர்புகளை இயக்குவதன் மூலம் முதலில் மேற்கொள்ளப்படுகிறது, பின்னர் மூன்று முக்கிய தொடர்புகள் KM1 ஐ மூடுகிறது. சுருள் KM1 மூடும் தொகுதி KM2 இன் தொடர்பு மூலம் மின்னழுத்தத்துடன் இணைக்கப்பட்டுள்ளது என்பதன் மூலம் இத்தகைய மாறுதல் வரிசை அடையப்படுகிறது. SB1 எழுத்துடன் வரைபடத்தில் குறிக்கப்பட்ட «நிறுத்து» பொத்தானை அழுத்துவதன் மூலம் இயந்திரம் நிறுத்தப்பட்டது.
அத்திப்பழத்தில். 5 ஆனது நேரத்தின் செயல்பாடாக இணை-உற்சாகமான DC மோட்டரின் தானியங்கி தொடக்கத்தின் வரைபடத்தைக் காட்டுகிறது. QF சர்க்யூட் பிரேக்கரை மூடுவதன் மூலம், மோட்டார் தொடங்குவதற்கு தயாராக உள்ளது. நேர ரிலே KT1 இன் முறுக்கு, மோட்டார் M இன் ஆர்மேச்சர் மற்றும் தொடக்க rheostat R1 + R2 இன் இரண்டு நிலைகளைக் கொண்ட சுற்று வழியாக மின்னோட்டம் பாய்கிறது.
அரிசி. 5. உற்சாகமான DC மோட்டாரின் நேரத்தின் செயல்பாடாக கட்டுப்பாட்டு சுற்று
ரிலே KT1 இன் சுருளின் அதிக எதிர்ப்பின் காரணமாக, இந்த சுற்றுவட்டத்தில் உள்ள மின்னோட்டம் மிகவும் சிறியது மற்றும் மோட்டார் மீது எந்த விளைவையும் ஏற்படுத்தாது, ஆனால் ரிலே தன்னைத் தூண்டுகிறது மற்றும் தொடர்பு KM1 இன் சுற்றுகளில் அதன் திறந்த தொடர்பு திறக்கிறது. இரண்டாவது முறை ரிலே KT2 இன் சுருளில், எதிர்ப்பு R1 உடன் இணையாக இணைக்கப்பட்டுள்ளது, அத்தகைய சிறிய மின்னோட்டம் அதை இயக்க முடியாது. மோட்டாரின் எல்எம் ஃபீல்டு வைண்டிங்கும் ஆன் ஆகும்.
SB2 பொத்தானை அழுத்துவதன் மூலம் மோட்டார் தொடங்கப்படுகிறது. அதே நேரத்தில், மோட்டாரின் ஆர்மேச்சர் சர்க்யூட்டில் உள்ள தொடர்பு KM மற்றும் அதன் தொடர்பு இயக்கப்பட்டது. பெரிய தொடக்க மின்னோட்டம் R1 மற்றும் R2 ஆகிய இரண்டு rheostat நிலைகளால் வரையறுக்கப்பட்டுள்ளது.இந்த மின்னோட்டத்தின் ஒரு பகுதி KT2 ரிலேயின் சுருளில் கிளைத்துள்ளது மற்றும் செயல்படுத்தப்படும் போது அது KM2 தொடர்பு சாதனத்தில் அதன் KT2 தொடர்பைத் திறக்கிறது. ஆர்மேச்சர் சர்க்யூட் எம் மூடப்படுவதோடு, கேஎம் கேஎம்மின் தொடர்பும் ரிலே கேடி 1 சுருளை குறுகிய சுற்றுகளாக மாற்றுகிறது.
குறிப்பிட்ட நேர இடைவெளிக்குப் பிறகு, ரிலே திரும்பும்போது, KT1 அதன் KT1 தொடர்பை KM1 கான்டாக்டர் சர்க்யூட்டில் மூடும். அதன் வேலை செய்யும் தொடர்பு KM1 உடன் இந்த கான்டாக்டர் தொடக்க ரியோஸ்டாட்டின் முதல் நிலை R1 மற்றும் நேர ரிலே KT2 இன் முறுக்கு ஆகியவற்றை ஷார்ட்-சர்க்யூட் செய்யும். திரும்பும் தாமதத்துடன், அதன் வேலை செய்யும் தொடர்புகள் KT2 ஆனது தொடர்புக் கருவி KM2 ஐ இயக்கும், அதன் வேலை தொடர்புகள் KM2 தொடக்க rheostat இன் இரண்டாம் நிலை R2 ஐ குறுகிய சுற்று செய்யும். இது இயந்திர தொடக்கத்தை நிறைவு செய்கிறது.
SB1 பொத்தானை அழுத்தினால், KM தொடர்பாளர் ஆர்மேச்சர் சர்க்யூட்டில் அதன் முக்கிய தொடர்பைத் துண்டித்துவிடும். ஆர்மேச்சர் ஆற்றலுடன் உள்ளது, ஆனால் அது ரிலே சுருள் KT1 உடன் தொடரில் இணைக்கப்பட்டுள்ளது என்று மாறிவிடும், இதன் காரணமாக ஒரு சிறிய மின்னோட்டம் அதன் வழியாக பாய்கிறது. ரிலே KT1 வேலை செய்யும், KM1 மற்றும் KM2 தொடர்புகளின் சுற்றுகளில் அதன் தொடர்பைத் திறக்கும், அவை அணைக்கப்பட்டு, அவற்றின் தொடர்புகள், குறுகிய சுற்று எதிர்ப்புகள் R1 மற்றும் R2 ஆகியவற்றைத் திறக்கும். மோட்டார் நிறுத்தப்படும், ஆனால் அதன் புல முறுக்கு மின்னோட்டத்துடன் இணைக்கப்பட்டுள்ளது, இதனால் மோட்டார் அடுத்த தொடக்கத்திற்கு தயாராக உள்ளது. தானியங்கி உள்ளீட்டு சுவிட்ச் பிபியை அணைப்பதன் மூலம் இயந்திரத்தின் முழுமையான பணிநிறுத்தம் செய்யப்படுகிறது.
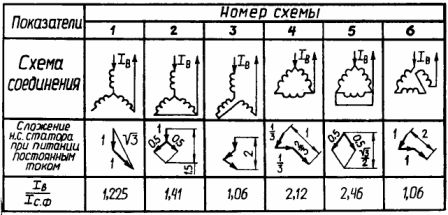
மோட்டார்களின் டைனமிக் பிரேக்கிங் நேரத்தின் செயல்பாடாகவும் செய்யப்படுகிறது. டைனமிக் பிரேக்கிங்கிற்கு, எடுத்துக்காட்டாக, ஒரு தூண்டல் மோட்டார், ஸ்டேட்டர் முறுக்கு மாற்று மின்னோட்ட நெட்வொர்க்கிலிருந்து துண்டிக்கப்பட்டு, அட்டவணை 1 இல் காட்டப்பட்டுள்ள திட்டங்களில் ஒன்றின் படி, நேரடி மின்னோட்ட மூலத்துடன் இணைக்கப்பட்டுள்ளது.வனவியல் மற்றும் மரவேலைத் தொழிலில், சிறப்பு குறைக்கடத்தி ரெக்டிஃபையர்களில் இருந்து நேரடி மின்னோட்டம் பெறப்படுகிறது. இந்த வழக்கில், நேரடி மின்னோட்டத்தின் சிறப்பு ஆதாரம் தேவையில்லை.
திட்டங்களில் ஒன்றின் படி ஸ்டேட்டர் முறுக்கு இயக்கப்பட்டால் (அட்டவணை 1 ஐப் பார்க்கவும்), ரெக்டிஃபையருக்கு முறுக்குகளில் ஒரு நிலையான காந்தப்புலம் உருவாக்கப்படுகிறது. ஒரு நிலையான புலத்தில், மோட்டாரின் சுழலி செயலற்ற தன்மையால் தொடர்ந்து சுழலும். இந்த வழக்கில், மோட்டரின் ரோட்டரில் ஒரு மாற்று EMF மற்றும் மின்னோட்டம் உருவாக்கப்படும், இது ஒரு மாற்று காந்தப்புலத்தை உற்சாகப்படுத்தும். ஸ்டேட்டரின் நிலையான புலத்துடன் தொடர்பு கொள்ளும்போது ரோட்டரின் மாறும் காந்தப்புலம் ஒரு பிரேக்கிங் முறுக்கு உருவாக்குகிறது. இந்த வழக்கில், ரோட்டார் மற்றும் டிரைவிலிருந்து சேமிக்கப்பட்ட இயக்க ஆற்றல் ரோட்டார் சுற்றுகளில் மின் ஆற்றலாகவும், பிந்தையது வெப்பமாகவும் மாற்றப்படுகிறது.
வெப்ப ஆற்றல் சுற்றுச்சூழலில் இருந்து சுற்றுச்சூழலுக்கு சிதறடிக்கப்படுகிறது. ரோட்டரில் உருவாகும் வெப்பம் மோட்டாரை சூடாக்கும். வெளியிடப்பட்ட வெப்பத்தின் அளவு நேரடி மின்னோட்டத்துடன் வழங்கப்படும் போது ஸ்டேட்டர் முறுக்கு மின்னோட்டத்தைப் பொறுத்தது. நேரடி மின்னோட்டத்துடன் வழங்கப்படும் போது ஸ்டேட்டர் முறுக்கை இயக்குவதற்கு ஏற்றுக்கொள்ளப்பட்ட திட்டத்தைப் பொறுத்து, ஸ்டேட்டரின் கட்ட மின்னோட்டத்திற்கு மின்னோட்டத்தின் விகிதம் வேறுபட்டதாக இருக்கும். பல்வேறு மாறுதல் திட்டங்களுக்கான இந்த மின்னோட்டங்களின் விகிதங்கள் அட்டவணையில் காட்டப்பட்டுள்ளன. 1
ஒரு தூண்டல் மோட்டாரின் டைனமிக் பிரேக்கிங் சர்க்யூட் அத்தி படத்தில் காட்டப்பட்டுள்ளது. 6.
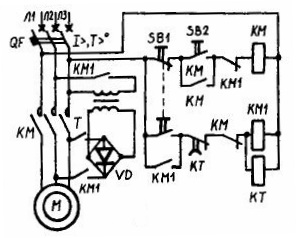
அரிசி. 6. ஒரு தூண்டல் மோட்டார் டைனமிக் பிரேக்கிங் திட்டம்
ஸ்டார்ட் பட்டனை SB1 அழுத்துவதன் மூலம், KM லைன் கான்டாக்டர் மோட்டாரை AC நெட்வொர்க்கில் இயக்குகிறது, அதன் மூடும் தொகுதி தொடர்பு KM சுருளை சுயமாக இயங்க வைக்கிறது.தொடக்க தொடர்பு KM ஆனது பிரேக் காண்டாக்டர் KM1 மற்றும் நேர ரிலே KT இன் சப்ளை சர்க்யூட்டை துண்டிக்கிறது. SB பட்டனை அழுத்தினால், KM லைன் கான்டாக்டர் டி-எனர்ஜைஸ் செய்யப்பட்டு, KM1 கான்டாக்டர் சுருள் சர்க்யூட் இயக்கப்படும்.
தொடர்பு KM1 அதன் தொடர்புகள் KM1 மின்மாற்றி டி மற்றும் ரெக்டிஃபையர் V இன் சுற்றுகளில் அடங்கும், இதன் விளைவாக ஸ்டேட்டர் முறுக்கு நேரடி மின்னோட்டத்துடன் வழங்கப்படும். லைன் காண்டாக்டரின் சீரற்ற சுயாதீன மாறுதலைத் தடுக்க, தொகுதி KM1 இன் தொடக்கத் தொடர்பு அதன் சுருள் KM உடன் தொடரில் இணைக்கப்பட்டுள்ளது. ஒரே நேரத்தில் பிரேக் காண்டாக்டருடன், டைம் ரிலே KT இயக்கப்பட்டது, அதன் திறந்த தொடர்பு KT கட்டமைக்கப்படுகிறது. ஒரு குறிப்பிட்ட நேர இடைவெளிக்குப் பிறகு சுருள் KM1 மற்றும் நேர ரிலேவை அணைக்கவும். நேர ரிலே அமைப்பு KT தேர்ந்தெடுக்கப்பட்டது, இதனால் ரிலே இயக்க நேரம் tkt என்பது மோட்டார் குறைப்பு நேரம் tT மற்றும் சரியான தொடர்பு KM1 ட்ரிப்பிங் நேரத்தின் கூட்டுத்தொகைக்கு சமமாக இருக்கும்.