சாலையின் செயல்பாடாக மோட்டார் கட்டுப்பாட்டு சுற்றுகள்
 ஒரு பாதை செயல்பாட்டில் உள்ள திசை ஆட்டோமேஷன் அல்லது கட்டுப்பாடு ஒரு பொறிமுறையின் இயக்கத்தை கட்டுப்படுத்த அல்லது பாதையின் எந்த இடைநிலை அல்லது இறுதி புள்ளியிலும் அதை நிறுத்த பயன்படுகிறது.
ஒரு பாதை செயல்பாட்டில் உள்ள திசை ஆட்டோமேஷன் அல்லது கட்டுப்பாடு ஒரு பொறிமுறையின் இயக்கத்தை கட்டுப்படுத்த அல்லது பாதையின் எந்த இடைநிலை அல்லது இறுதி புள்ளியிலும் அதை நிறுத்த பயன்படுகிறது.
கட்டுப்படுத்தப்பட்ட கடமை சுழற்சிகளுக்கான முக்கிய விருப்பங்கள் ரயில் ஆட்டோமேஷன் கூறுகள், இருக்க முடியும்: சுழற்சியின் முடிவில் மின்சார இயக்கியின் தானியங்கி பணிநிறுத்தம், இயக்ககத்தின் ஒவ்வொரு உறுப்புகளின் இயக்கப் பாதையின் தானாக வரம்புடன் நேரத்தைப் பிடிக்காமல் மற்றும் இறுதிப் புள்ளிகளில் வைத்திருக்கும் போது, ஒவ்வொரு சுழற்சியின் பின்னரும் பொறிமுறையை நிறுத்துவதன் மூலம் மாற்றியமைத்தல் அல்லது நீண்ட விண்கல இயக்கத்துடன்.
வரம்பு சுவிட்சின் செயலிழப்பு விபத்துக்கு வழிவகுக்கும் சந்தர்ப்பங்களில், இயந்திரத்தை அணைக்கும் வரம்பு சுவிட்சுகள் கூடுதலாக நிறுவப்பட்டுள்ளன.
இயக்கப்படும் சுற்றுகளில், காந்த ஸ்டார்டர்கள் கொண்ட சக்திப் பிரிவு காட்டப்படவில்லை: விநியோக சுற்றுகளின் முக்கிய தொடர்புகள் இயக்கப்படுகின்றன: மீளமுடியாத ஸ்டார்ட்டருடன் KM மற்றும் சுருள்கள் KM1 மற்றும் KM2 மூலம் ஸ்டார்டர் மாற்றியமைக்கப்படுகிறது.
அத்தியில் உள்ள வரைபடங்கள்.a மற்றும் b வரம்பு சுவிட்ச் மூலம் பொறிமுறையின் இயக்கத்தின் முடிவில் மோட்டாரை அணைக்க வழங்குகிறது மற்றும் கட்டுப்பாட்டு சுற்று மற்றும் அதன் விளைவாக செயல்பாட்டு பண்புகளில் மட்டுமே அதன் இட ஒதுக்கீடு ஆகியவற்றில் ஒருவருக்கொருவர் வேறுபடுகின்றன. முதல் சர்க்யூட்டில், லிமிட் சுவிட்ச் மூலம் நிறுத்தப்பட்ட மோட்டாரை அழுத்துவதன் மூலம் அதே திசையில் மறுதொடக்கம் செய்ய முடியாது தொடக்க பொத்தான், இரண்டாவது திட்டத்தில், பொத்தானை மீண்டும் அழுத்தினால், பொறிமுறையானது தொடர்ந்து நகரும்.
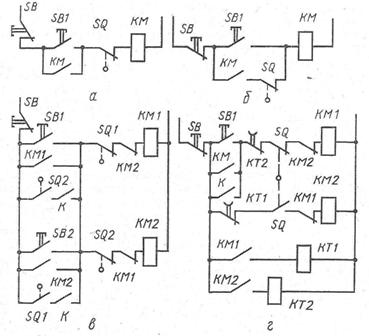
அரிசி. வரம்பு சுவிட்சுகளுடன் பயணத்தின் செயல்பாடாக மோட்டார் கட்டுப்பாட்டு திட்டங்கள்: a மற்றும் b - பொறிமுறையின் இயக்கத்தின் முடிவில் மோட்டார் பணிநிறுத்தம், c - பொறிமுறையின் இயக்கத்தின் வரம்புடன், d - இறுதி நிலைகளின் கால தாமதத்துடன் சுழற்சி இயக்கம்
படத்தின் கட்டுப்பாட்டு சுற்று. c இரண்டு வரம்பு சுவிட்சுகள் SQ1 மற்றும் SQ2 ஆகியவற்றால் வரையறுக்கப்பட்ட பாதையில் பொறிமுறையின் இயக்கத்தை வழங்குகிறது, மேலும் வேலையை தனித்துவமான மற்றும் தொடர்ச்சியான பக்கவாதம் மூலம் மேற்கொள்ளலாம். முதல் வழக்கில், பொறிமுறையானது SB1 பொத்தானை அழுத்தும்போது முன்னோக்கி நகர்த்தத் தொடங்குகிறது மற்றும் வரம்பு சுவிட்ச் SQ1 ஐ அழுத்தும் வரை நகரும். இந்த நிலையில் இருந்து பொறிமுறையை அகற்ற, SB2 பொத்தானை அழுத்தவும்.
KM1 மற்றும் KM2 சுருள்களின் சுற்றுகளில் KM2 மற்றும் KM1 தொடர்புகளைத் திறப்பது தடுப்பதற்குப் பயன்படுத்தப்படுகிறது.

இறுதி நிலைகளில் வெவ்வேறு நேர தாமதங்களைக் கொண்ட பொறிமுறையின் சுழற்சி செயல்பாட்டிற்கு, அத்தியில் உள்ள வரைபடம். d. முன்னோக்கி இயந்திரத்தைத் தொடங்கும் போது, தொடக்க பொத்தான் SB1 நேர ரிலே KT1 ஐ இயக்குகிறது மற்றும் தொடர்பு KM2 இன் சுருளின் சுற்றுகளில் அதன் தொடர்பைத் திறக்கிறது. பயண சுவிட்ச் SQ செயல்படுத்தப்படும் வரை இயக்கம் தொடர்கிறது, இது தொடர்பு சுருள் KM1 இன் சர்க்யூட்டைத் திறந்து, அதனுடன் இயந்திரத்தனமாக இணைக்கப்பட்ட SQ தொடர்பை மூடுகிறது. ஆனால் தலைகீழ் உடனடியாக நடக்காது, ஏனெனில் தொடக்க தொடர்பு KT1 இன்னும் திறந்திருக்கும்.
தொடர்பு KM1 இலிருந்து துண்டிக்கப்பட்ட நேர ரிலே KT1, செட் டைம் தாமதத்தை எண்ணி, காண்டாக்டர் KM2 இன் சுருளை இயக்கி, மோட்டாரைத் திருப்புகிறது. KM2 க்ளோசிங் பிளாக் தொடர்பு மூலம், நேர ரிலே KT2 ஆன் மற்றும் சர்க்யூட்டை உடைக்கிறது. தொடர்பு KT2 உடன் சுருள் KM1. மின் மோட்டார் இயக்கப்பட்டு வரம்பு சுவிட்ச் செயல்படும் வரை பொறிமுறையை நகர்த்துகிறது, அதன் பிறகு சுழற்சி அதே வரிசையில் மீண்டும் நிகழ்கிறது.
இயக்க நிலைமைகளின்படி, ஒரு இறுதி நிலையில் மட்டுமே நேர தாமதம் தேவைப்பட்டால், ஒரு முறை ரிலே மற்றும் அதன் தொடக்க தொடர்பு கட்டுப்பாட்டு சுற்றுகளில் அணைக்கப்படும்.