ஜெனரேட்டர் அமைப்பு - DC மோட்டார்
 காந்தப் பாய்ச்சலைச் சரிசெய்வதன் மூலம் வழங்கப்படுவதை விட, பல்வேறு இயந்திரக் கருவிகளுக்கு இயக்கி வேகத்தை ஒரு பரந்த வரம்பில் கட்டற்ற கட்டுப்பாடு தேவைப்படுகிறது. இணையான தூண்டுதலுடன் DC மோட்டார்… இந்த சந்தர்ப்பங்களில், மிகவும் சிக்கலான மின்சார இயக்கி அமைப்புகள் பயன்படுத்தப்படுகின்றன.
காந்தப் பாய்ச்சலைச் சரிசெய்வதன் மூலம் வழங்கப்படுவதை விட, பல்வேறு இயந்திரக் கருவிகளுக்கு இயக்கி வேகத்தை ஒரு பரந்த வரம்பில் கட்டற்ற கட்டுப்பாடு தேவைப்படுகிறது. இணையான தூண்டுதலுடன் DC மோட்டார்… இந்த சந்தர்ப்பங்களில், மிகவும் சிக்கலான மின்சார இயக்கி அமைப்புகள் பயன்படுத்தப்படுகின்றன.
அத்திப்பழத்தில். 1 ஜெனரேட்டர்-மோட்டார் அமைப்பின் படி சரிசெய்யக்கூடிய மின்சார இயக்ககத்தின் வரைபடத்தைக் காட்டுகிறது (சுருக்கமாக ஜி - டி). இந்த அமைப்பில், ஒரு இண்டக்ஷன் மோட்டார் IM ஆனது ஒரு சுயாதீனமான உற்சாகமான DC ஜெனரேட்டர் G மற்றும் ஒரு எக்ஸைட்டர் B ஆகியவற்றை தொடர்ந்து சுழற்றுகிறது, இது ஒரு இணை-உற்சாகமான குறைந்த-சக்தி DC ஜெனரேட்டராகும்.
டிசி மோட்டார் டி இயந்திரத்தின் வேலை செய்யும் உடலை இயக்குகிறது. ஜெனரேட்டர் OVG மற்றும் மோட்டார் ஏடிஎஸ் ஆகியவற்றின் தூண்டுதல் முறுக்குகள் எக்ஸைட்டர் பி மூலம் வழங்கப்படுகின்றன. ஜெனரேட்டர் ஜியின் தூண்டுதல் சுற்றுக்கான எதிர்ப்பை ரியோஸ்டாட் 1 மூலம் மாற்றுவதன் மூலம், டி மோட்டாரின் ஆர்மேச்சருக்குப் பயன்படுத்தப்படும் மின்னழுத்தம் மாற்றப்படுகிறது, இதனால் மோட்டார் வேகம் கட்டுப்படுத்தப்படுகிறது. இந்த வழக்கில், rheostat 2 அகற்றப்பட்டதால், மோட்டார் முழு மற்றும் நிலையான ஃப்ளக்ஸில் செயல்படுகிறது.
மின்னழுத்தம் U மாறும்போது, வேகம் n0 ஐடியல் மோட்டார் செயலற்ற வேகம் D. மோட்டார் ஃப்ளக்ஸ் மற்றும் அதன் ஆர்மேச்சர் சர்க்யூட் எதிர்ப்பு மாறாததால், சாய்வு b மாறாமல் இருக்கும். எனவே, U இன் வெவ்வேறு மதிப்புகளுடன் தொடர்புடைய நேர்கோட்டு இயந்திர பண்புகள் ஒன்றின் கீழே மற்றொன்றுக்கு இணையாக அமைந்துள்ளன (படம் 2).
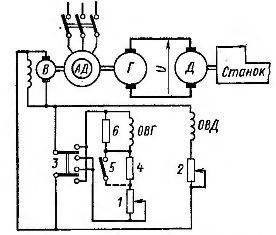
அரிசி. 1. சிஸ்டம் ஜெனரேட்டர் - DC மோட்டார் (dpt)
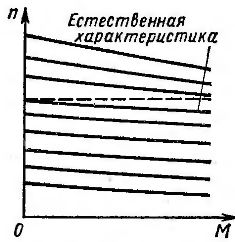
அரிசி. 2. ஜெனரேட்டரின் இயந்திர பண்புகள் - DC மோட்டார் அமைப்பு
நிலையான நெட்வொர்க்கிலிருந்து செலுத்தப்படும் அதே மின்சார மோட்டாரின் பண்புகளை விட அவை அதிக சாய்வைக் கொண்டுள்ளன, ஏனெனில் ஜி - டி அமைப்பில் ஜெனரேட்டரின் நிலையான தூண்டுதல் மின்னோட்டத்தில் மின்னழுத்தம் U சார்புக்கு ஏற்ப அதிகரிக்கும் சுமையுடன் குறைகிறது:
எங்கே எ.கா. மற்றும் rg - e, முறையே. முதலியன pp. மற்றும் ஜெனரேட்டரின் உள் எதிர்ப்பு.
ஒத்திசைவற்ற மோட்டார்களுடன் ஒப்புமை மூலம், நாங்கள் குறிக்கிறோம்
சுமை பூஜ்ஜியத்திலிருந்து பெயரளவிற்கு அதிகரிக்கும் போது இயந்திர வேகம் குறைவதை இந்த மதிப்பு வகைப்படுத்துகிறது. இணையான இயந்திர பண்புகளுக்கு
n0 குறையும்போது இந்த மதிப்பு அதிகரிக்கிறது. Sn இன் பெரிய மதிப்புகளில், குறிப்பிட்ட வெட்டு நிலைகள் சீரற்ற சுமை ஏற்ற இறக்கங்களுடன் கணிசமாக மாறும். எனவே, மின்னழுத்த ஒழுங்குமுறை வரம்பு பொதுவாக 5:1 க்கும் குறைவாக இருக்கும்.
மோட்டார்களின் மதிப்பிடப்பட்ட சக்தி குறைவதால், மோட்டார்கள் முழுவதும் மின்னழுத்த வீழ்ச்சி அதிகரிக்கிறது மற்றும் இயந்திர பண்புகள் செங்குத்தாக மாறும். இந்த காரணத்திற்காக, G -D அமைப்பின் மின்னழுத்த ஒழுங்குமுறை வரம்பு சக்தி குறைவதால் குறைக்கப்படுகிறது (1 kW முதல் 3:1 அல்லது 2:1 வரையிலான சக்திகளுக்கு).
ஜெனரேட்டரின் காந்தப் பாய்வு குறைவதால், அதன் ஆர்மேச்சர் எதிர்வினையின் டிமேக்னடைசிங் விளைவு அதன் மின்னழுத்தத்தை அதிக அளவில் பாதிக்கிறது. எனவே, குறைந்த இயந்திர வேகத்துடன் தொடர்புடைய பண்புகள் உண்மையில் இயந்திர பண்புகளை விட அதிக சாய்வைக் கொண்டுள்ளன.
ஜெனரேட்டரின் முழு ஓட்டத்தில் உற்பத்தி செய்யப்படும் rheostat 2 (படம் 1 ஐப் பார்க்கவும்) மூலம் மோட்டார் D இன் காந்தப் பாய்ச்சலைக் குறைப்பதன் மூலம் கட்டுப்பாட்டு வரம்பின் விரிவாக்கம் அடையப்படுகிறது. ஒன்று (படம் 2 பார்க்கவும்).
இரண்டு முறைகளின் கட்டுப்பாட்டு வரம்புகளின் தயாரிப்புக்கு சமமான மொத்த கட்டுப்பாட்டு வரம்பு, (10 - 15) அடையும்: 1. மின்னழுத்த ஒழுங்குமுறை நிலையான முறுக்கு கட்டுப்பாடு (மோட்டார் காந்தப் பாய்வு மாறாமல் இருப்பதால்). மோட்டார் D இன் காந்தப் பாய்ச்சலை மாற்றுவதன் மூலம் ஒழுங்குபடுத்துவது ஒரு நிலையான சக்தி ஒழுங்குமுறை ஆகும்.
மோட்டாரைத் தொடங்குவதற்கு முன், D rheostat 2 (படம் 1 ஐப் பார்க்கவும்) முற்றிலும் அகற்றப்பட்டு, மோட்டார் ஃப்ளக்ஸ் அதிக மதிப்பை அடைகிறது. பின்னர் rheostat 1 ஜெனரேட்டர் G இன் உற்சாகத்தை அதிகரிக்கிறது. இது மின்னழுத்தத்தை அதிகரிக்கிறது மற்றும் மோட்டார் D இன் வேகத்தை அதிகரிக்கிறது. சுருள் OVG உடனடியாக எக்ஸைட்டர் B இன் முழு மின்னழுத்த UB உடன் இணைக்கப்பட்டிருந்தால், அதில் உள்ள மின்னோட்டம், தூண்டல் மற்றும் செயலில் உள்ள எதிர்ப்பைக் கொண்ட எந்த சுற்றுகளிலும் அதிகரிக்கும்:
இதில் rv என்பது தூண்டுதல் சுருளின் எதிர்ப்பாகும், LB என்பது அதன் தூண்டல் ஆகும் (காந்த சுற்றுகளின் செறிவூட்டலின் விளைவை புறக்கணிக்கவும்).
அத்திப்பழத்தில். 3, a (வளைவு 1) சரியான நேரத்தில் தூண்டுதல் மின்னோட்டத்தின் சார்பு வரைபடத்தைக் காட்டுகிறது. தூண்டுதல் மின்னோட்டம் படிப்படியாக அதிகரிக்கிறது; அதிகரிப்பு விகிதம் விகிதத்தால் தீர்மானிக்கப்படுகிறது

டிவி என்பது ஜெனரேட்டர் தூண்டுதல் முறுக்கின் மின்காந்த நேர மாறிலி ஆகும்; அது காலத்தின் பரிமாணத்தைக் கொண்டுள்ளது.
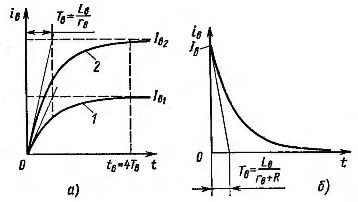
அரிசி. 3. G-D அமைப்பில் தூண்டுதல் மின்னோட்டத்தை மாற்றுதல்
தொடக்கத்தில் ஜெனரேட்டர் மின்னழுத்தத்தில் ஏற்படும் மாற்றம் தூண்டுதல் மின்னோட்டத்தின் மாற்றத்தின் தோராயமான அதே தன்மையைக் கொண்டுள்ளது. இது அகற்றப்பட்ட rheostat 1 உடன் தானாக மோட்டாரைத் தொடங்க உதவுகிறது (படம் 1 ஐப் பார்க்கவும்).
ஜெனரேட்டரின் தூண்டுதல் மின்னோட்டத்தின் அதிகரிப்பு, ஆரம்ப தருணத்தில் தூண்டுதலின் முறுக்கு பெயரளவுக்கு அதிகமான மின்னழுத்தத்தை பயன்படுத்துவதன் மூலம் அடிக்கடி துரிதப்படுத்தப்படுகிறது (கட்டாயப்படுத்தப்படுகிறது) பின்னர் தூண்டுதலை அதிகரிக்கும் செயல்முறை வளைவு 2 இல் தொடரும் (படம் 3, a ஐப் பார்க்கவும். ) சுருளில் உள்ள மின்னோட்டம் Iv1 ஐ அடையும் போது, மதிப்பிடப்பட்ட மின்னழுத்தத்தில் நிலையான-நிலை தூண்டுதல் மின்னோட்டத்திற்கு சமமாக, தூண்டுதல் சுருளின் மின்னழுத்தம் பெயரளவுக்கு குறைக்கப்படுகிறது. பெயரளவுக்கு தூண்டுதல் மின்னோட்டத்தின் எழுச்சி நேரம் குறைக்கப்படுகிறது.
ஜெனரேட்டரின் தூண்டுதலை கட்டாயப்படுத்த, தூண்டுதல் மின்னழுத்தம் V (படம் 1 ஐப் பார்க்கவும்) ஜெனரேட்டர் தூண்டுதல் சுருளின் பெயரளவு மின்னழுத்தத்தை விட 2-3 மடங்கு அதிகமாக தேர்ந்தெடுக்கப்பட்டது மற்றும் கூடுதல் மின்தடையம் 4 சுற்றுக்குள் அறிமுகப்படுத்தப்படுகிறது. …
ஜெனரேட்டர்-மோட்டார் அமைப்பு மீளுருவாக்கம் செய்யும் பிரேக்கிங்கை செயல்படுத்துகிறது. நிறுத்த, ஆர்மேச்சரில் உள்ள மின்னோட்டம் அதன் திசையை மாற்றுவது அவசியம். முறுக்கு அடையாளத்தை மாற்றும் மற்றும் ஓட்டுவதற்கு பதிலாக, அது பிரேக்கிங் ஆகிவிடும். மோட்டார் rheostat 2 இன் காந்தப் பாய்வு அதிகரிக்கும் போது அல்லது rheostat 1 உடன் ஜெனரேட்டர் மின்னழுத்தம் குறையும் போது நிறுத்தம் ஏற்படுகிறது. இரண்டு நிகழ்வுகளிலும், எ.கா. முதலியன c. மோட்டாரின் E ஆனது ஜெனரேட்டரின் மின்னழுத்த U ஐ விட அதிகமாகிறது.இந்த வழக்கில், மோட்டார் டி ஜெனரேட்டர் பயன்முறையில் இயங்குகிறது மற்றும் நகரும் வெகுஜனங்களின் இயக்க ஆற்றலால் சுழற்சியில் இயக்கப்படுகிறது, மேலும் ஜெனரேட்டர் ஜி மோட்டார் பயன்முறையில் இயங்குகிறது, IM இயந்திரத்தை சூப்பர் சின்க்ரோனஸ் வேகத்தில் சுழற்றுகிறது, அதே நேரத்தில் ஜெனரேட்டர் பயன்முறைக்கு மாறுகிறது மற்றும் நெட்வொர்க்கிற்கு மின்சாரம் வழங்குகிறது.
ரியோஸ்டாட்கள் 1 மற்றும் 2 ஐ பாதிக்காமல் மீளுருவாக்கம் பிரேக்கிங் செய்ய முடியும். நீங்கள் ஜெனரேட்டர் தூண்டுதல் சுற்று (எ.கா. சுவிட்ச் 3) திறக்கலாம். இந்த வழக்கில், ஜெனரேட்டர் மற்றும் மின்தடையம் 6 இன் தூண்டுதல் முறுக்குகளைக் கொண்ட ஒரு மூடிய மின்னோட்டத்தில் மின்னோட்டம் படிப்படியாக குறையும்.
R என்பது மின்தடையம் 6 இன் எதிர்ப்பாகும்.
இந்த சமன்பாட்டுடன் தொடர்புடைய வரைபடம் படத்தில் காட்டப்பட்டுள்ளது. 3, பி. இந்த வழக்கில் ஜெனரேட்டரின் தூண்டுதல் மின்னோட்டத்தில் ஒரு படிப்படியான குறைவு rheostat 1 இன் எதிர்ப்பின் அதிகரிப்புக்கு சமம் (படம் 1 ஐப் பார்க்கவும்) மற்றும் மறுபிறப்பு பிரேக்கிங் ஏற்படுகிறது. இந்த சுற்றுவட்டத்தில், ஜெனரேட்டரின் உற்சாக முறுக்குடன் இணையாக இணைக்கப்பட்ட மின்தடையம் 6 ஒரு வெளியேற்ற மின்தடையமாகும். இது தூண்டுதல் சுற்று திடீரென அவசர குறுக்கீடு ஏற்பட்டால் சேதத்திலிருந்து தூண்டுதல் முறுக்கு காப்பு பாதுகாக்கிறது.
தூண்டுதல் சுற்று குறுக்கிடப்பட்டால், இயந்திரத்தின் காந்தப் பாய்வு கூர்மையாக குறைகிறது, தூண்டுதல் சுருளின் திருப்பங்களில் மின் தூண்டுகிறது. முதலியன c. சுய-தூண்டல் மிகவும் பெரியது, அது முறுக்கு காப்பு உடைந்து போகலாம். டிஸ்சார்ஜ் ரெசிஸ்டர் 6 ஒரு சுற்று உருவாக்குகிறது இதில் இ. முதலியன c. புலச் சுருளின் சுய-தூண்டல் மின்னோட்டத்தைத் தூண்டுகிறது, இது காந்தப் பாய்வு குறைவதைக் குறைக்கிறது.
டிஸ்சார்ஜ் ரெசிஸ்டரின் மின்னழுத்த வீழ்ச்சியானது புல சுருளில் உள்ள மின்னழுத்தத்திற்கு சமம்.வெளியேற்ற எதிர்ப்பின் குறைந்த மதிப்பு, சுற்று உடைக்கப்படும் போது தூண்டுதல் சுருளின் குறைந்த மின்னழுத்தம். அதே நேரத்தில், டிஸ்சார்ஜ் ரெசிஸ்டரின் எதிர்ப்பு மதிப்பில் குறைவதால், சாதாரண பயன்முறையில் அதன் வழியாக தொடர்ந்து பாயும் மின்னோட்டம் மற்றும் அதில் உள்ள இழப்புகள் அதிகரிக்கும். வெளியேற்ற எதிர்ப்பு மதிப்பைத் தேர்ந்தெடுக்கும்போது இரண்டு விதிகளையும் கருத்தில் கொள்ள வேண்டும்.
ஜெனரேட்டரின் தூண்டுதல் முறுக்கு அணைக்கப்பட்ட பிறகு, எஞ்சிய காந்தத்தன்மை காரணமாக அதன் முனையங்களில் ஒரு சிறிய மின்னழுத்தம் இருக்கும். இது க்ரீப் ஸ்பீட் எனப்படும் மோட்டாரை மெதுவாகச் சுழலச் செய்யலாம். இந்த நிகழ்வை அகற்ற, ஜெனரேட்டரின் தூண்டுதல் முறுக்கு, எக்ஸைட்டரில் இருந்து துண்டிக்கப்பட்ட பிறகு, ஜெனரேட்டரின் முனையங்களுடன் இணைக்கப்பட்டுள்ளது, இதனால் எஞ்சிய காந்தத்திலிருந்து வரும் மின்னழுத்தம் ஜெனரேட்டரின் தூண்டுதல் முறுக்குகளில் ஒரு காந்தமாக்கும் மின்னோட்டத்தை ஏற்படுத்துகிறது.
மின்சார மோட்டார் D ஐ மாற்றியமைக்க, ஜெனரேட்டர் OVG G இன் தூண்டுதல் சுருளில் மின்னோட்டத்தின் திசையானது சுவிட்ச் 3 (அல்லது மற்றொரு ஒத்த சாதனம்) பயன்படுத்தி மாற்றப்படுகிறது. சுருளின் குறிப்பிடத்தக்க தூண்டல் காரணமாக, தூண்டுதல் மின்னோட்டம் படிப்படியாக குறைகிறது, திசையை மாற்றுகிறது, பின்னர் படிப்படியாக அதிகரிக்கிறது.
கருதப்பட்ட அமைப்பில் மோட்டாரைத் தொடங்குதல், நிறுத்துதல் மற்றும் தலைகீழாக மாற்றுதல் போன்ற செயல்முறைகள் மிகவும் சிக்கனமானவை, ஏனெனில் அவை ஆர்மேச்சரில் சேர்க்கப்பட்டுள்ள ரியோஸ்டாட்களைப் பயன்படுத்தாமல் மேற்கொள்ளப்படுகின்றன. சிறிய புல நீரோட்டங்களை மட்டுமே கட்டுப்படுத்தும் ஒளி மற்றும் கச்சிதமான உபகரணங்களைப் பயன்படுத்தி மோட்டார் தொடங்கப்பட்டு வேகப்படுத்தப்படுகிறது. எனவே, இந்த "ஜெனரேட்டர் - டிசி மோட்டார்" அமைப்பு அடிக்கடி தொடங்குதல், பிரேக்குகள் மற்றும் தலைகீழ் மாற்றங்களுடன் வேலை செய்ய பரிந்துரைக்கப்படுகிறது.
மோட்டார்-ஜெனரேட்டர்-டிசி அமைப்பின் முக்கிய தீமைகள் ஒப்பீட்டளவில் குறைந்த செயல்திறன், அதிக செலவு மற்றும் கணினியில் அதிக எண்ணிக்கையிலான மின்சார இயந்திரங்கள் இருப்பதால் சிக்கலானவை. கணினியின் விலை அதே சக்தியுடன் 8 - 10 மடங்கு ஒரு ஒத்திசைவற்ற அணில்-கூண்டு மோட்டாரின் விலையை மீறுகிறது. மேலும், அத்தகைய மின்சார இயக்கி அமைப்பு நிறைய இடம் தேவைப்படுகிறது.